Circuits de control del motor en funció de la velocitat
 En el control del motor, la velocitat es controla en funció de la velocitat del rotor del motor per influir en els elements de control corresponents a mesura que canvia.
En el control del motor, la velocitat es controla en funció de la velocitat del rotor del motor per influir en els elements de control corresponents a mesura que canvia.
Els relés de control de velocitat o els petits generadors elèctrics de mesura es poden utilitzar en els circuits de control d'arrencada del motor. Tanmateix, s'utilitzen molt poques vegades per a aquests propòsits a causa de la complexitat del disseny, l'alt cost i la fiabilitat insuficient. Per tant, la velocitat del motor es controla mitjançant mètodes indirectes. En motors asíncrons i síncrons, la freqüència de rotació està controlada per la fem i la freqüència del corrent del rotor, i en els motors de corrent continu per la fem de l'induït.
A la fig. Les figures 1, a i b mostren esquemes d'arrencada automàtica d'un motor de corrent continu excitat en paral·lel en funció de la freqüència de gir i depenent de l'EMF i la tensió de l'induït des del moment de l'arrencada. El control de la freqüència de gir es realitza mitjançant la mesura de la FEM del motor, que varia en proporció a la freqüència de gir.
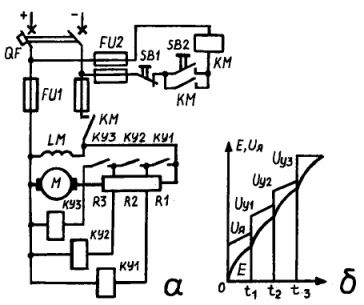
Arròs. 1.Circuits de control en funció de la velocitat: a i b — circuit i diagrama d'arrencada d'un motor de corrent continu excitat en paral·lel
Com que l'EMF és proporcional a la velocitat del motor, l'entrada automàtica de les etapes individuals del reòstat d'arrencada es realitza a una certa magnitud de la tensió d'accionament dels contactors d'acceleració KM1, KM2 i KMZ, cadascun dels quals s'estableix en una certa retracció. valor. Prement el motor d'arrencada botons SB2 activa el contactor de línia KM. Totes les resistències R1, R2, R3 es connectaran en sèrie amb el bobinatge de l'induït i limitaran el corrent.
A una certa velocitat n1, la tensió Uy1 de la bobina del contactor K1 és

on Aquí Aquest és el coeficient de la màquina.
Quan Uy1 sigui igual a la tensió de desplegament, el contactor KM1 funcionarà i curtcircuitarà la resistència R1. Un nou augment de la velocitat de rotació fins a la rotació de n2 i n3 comportarà un augment de la tensió a les bobines dels contactors K2 i un curtcircuit als valors.


En aquest cas, els contactors K2 i el curtcircuit funcionaran en sèrie i curtcircuitaran les resistències R2 i R3. Després de curtcircuitar la resistència R3, el procés d'arrencada es completarà i el motor pot funcionar durant molt de temps.
L'EMF al circuit del rotor del motor d'inducció és proporcional al lliscament, és a dir, E2s = E2s. Aquí E2 és la fem d'un rotor estacionari.
Com més baix sigui el lliscament, més baix serà l'EMF, és a dir, més gran serà la velocitat del rotor del motor. Per controlar l'arrencada dels motors de CA amb un rotor bobinat, s'utilitzen relés que controlen el valor de la EMF al circuit del rotor.A aquestes tensions s'ajusten els corresponents dispositius (relés, contactors) que curtcircuiten les resistències d'arrencada.
Per al control de motors d'inducció de rotor bobinat i motors síncrons, el mètode de freqüència també es pot utilitzar en funció de la velocitat. Aquest mètode es basa en la dependència coneguda de la freqüència del corrent del rotor f2 de la freqüència de gir del camp de l'estator n0 i del rotor n2, és a dir.
Com que cada velocitat del rotor correspon a un determinat valor de f2, un relé configurat a aquesta freqüència i connectat al circuit del rotor del motor actuarà sobre el circuit de la bobina del contactor. El contactor curtcircuitarà les etapes de resistència a una velocitat determinada.
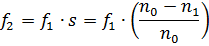
El frenat per motors oposats es fa en funció de la velocitat relé de control de velocitat SR. A la figura 2, a, b mostren exemples d'aturada de motors asíncrons per oposició.
Arròs. 2. Esquemes d'aturada de motors asíncrons per oposició: a — no reversible; b - reversible
Fem una ullada a com funcionen aquests esquemes.
En prémer el botó SB2 s'encén la bobina del contactor KM (vegeu Fig. 2, a), que tanca els contactes d'alimentació i bloqueja el botó SB2. Al mateix temps, el contacte del bloc d'obertura KM al circuit de la bobina del contactor de fre KM1 i el relé de control de velocitat SR els desconnecta de la xarxa. Quan el rotor del motor assoleix una certa velocitat, el contacte SR es tancarà, però això ja no farà que el contactor KM1 funcioni. El motor continua funcionant amb normalitat.
L'aturada del motor amb un fre de contraconmutació es fa prement el botó SB.Al mateix temps, la bobina del contactor KM es neutralitza i els seus contactes principals desapareixen i desconnecten el motor de la xarxa. El contacte d'obertura KM al circuit del contactor de fre del KM1 es tancarà. Com que en aquest moment el contacte del relé de control de velocitat SR està tancat, els contactes principals del contactor del fre s'encenen immediatament i el bobinatge de l'estator es canvia a la inversa, el camp magnètic començarà a girar en sentit contrari, és a dir. la rotació del rotor i del motor s'aturarà mitjançant la commutació del comptador. La velocitat del rotor disminueix i, a un cert valor petit, els seus contactes del relé de control de velocitat RKS s'obriran i desconnectaran el motor de la xarxa elèctrica.
En el cas del control invers amb frenada oposada (Fig. 2, b), el motor s'engega cap endavant prement el botó SB1 que, tancant el circuit de la bobina del contactor KM1, assegura que el motor estigui connectat al xarxa. El rotor del motor començarà a girar i quan assoleixi una determinada velocitat, el contacte de tancament SR1 del relé de control de velocitat es tancarà i el contacte d'obertura SR2 s'obrirà.
L'encesa de la bobina del contactor KM2 no es produirà perquè el contacte d'obertura del contactor KM1 ha trencat el seu circuit. En aquesta posició, el motor continuarà funcionant fins que es prem el botó SB. Quan es prem el botó SB, el circuit de la bobina KM1 s'apaga. Això tancarà el contacte de ruptura KM1 i el circuit de bobina del contactor KM2 rebrà energia.
El bobinatge de l'estator del motor s'enganxarà per invertir. A mesura que el rotor continua girant en la mateixa direcció per inèrcia, es produeix una frenada d'oposició.Quan la velocitat disminueix a un cert valor petit, el relé de control de velocitat obre el seu contacte SR1, el contactor KM2 s'apaga i desconnecta el motor de la xarxa.
Per engegar el motor en reversa, premeu el botó SB2. Tot el procés serà similar al descrit. Ara la funció del contactor de fre el juga el contactor KM1 i els contactes SR2 del relé de control de velocitat controlaran el procés de frenada.
L'arrencada automàtica d'un motor síncron està associat a dificultats conegudes, ja que en aquest cas cal no només limitar el corrent d'arrencada, sinó també sincronitzar la màquina amb la xarxa.
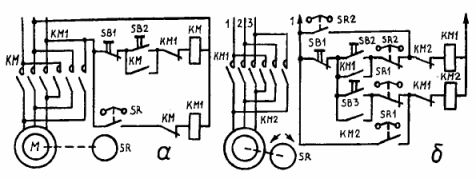
El circuit de control d'un motor síncron de baixa potència es mostra a la Fig. 3. La limitació del corrent d'entrada la proporcionen les resistències actives incloses al bobinatge de l'estator. Abans d'engegar el motor, activeu els interruptors d'entrada automàtica QF i QF1 de la xarxa de CA i CC, que proporcionen la màxima protecció tèrmica. En prémer el botó d'arrencada SB2, la bobina del contactor KM s'encén i el bobinat de l'estator del motor síncron a través dels contactes principals de KM es connecta a la xarxa mitjançant les resistències d'arrencada Rn. La bobina és autoblocant i el seu contacte al circuit de corrent continu inclou el relé de bloqueig KV, el contacte de tancament del qual, tancant, prepara les bobines dels contactors K1 i K2 per a l'encesa.
Els relés de freqüència KF1 i KF2 del circuit d'excitació del rotor LM funcionen en funció de la velocitat del motor.A l'arrencada, quan el lliscament del rotor és més gran, s'obren els contactes de ruptura dels relés KF1 i KF2.L'obertura de les bobines es produeix abans que el relé de bloqueig KV s'encengui i la bobina K1 no rebrà energia. Els contactes del relé KF1 i KF2 es tancaran de nou quan les RPM del motor arribin aproximadament al 60-95% de manera sincrònica d'acord amb la regulació del relé.
Després de tancar els contactes del relé KF1, la bobina del contactor K1 s'encén, els seus contactes al circuit principal curtcircuitaran les resistències d'arrencada Rp i l'estator s'encén a la tensió de línia completa. Quan es tanquen els contactes oberts del relé KF2, es crea un circuit per alimentar la bobina del contactor K2, independentment del contactor K1, el seu contacte s'obre a una velocitat d'aproximadament el 60% de la velocitat síncrona.
El contactor K2 té dos bobinatges: un principal, que tira KM1 i el segon bobinat KM2, dissenyat per alliberar el bloqueig, que es proporciona amb el contactor. Després d'encendre la bobina de presa KM1, els contactes de tancament K2 es tanquen al circuit d'excitació i els contactes d'obertura K2 s'obren, desconnectant el bobinat del rotor de les resistències de descàrrega R1 i R2 i connectant el rotor a la xarxa de corrent continu.
Arròs. 3. Esquema de control del motor síncron
Els contactes del contactor K2 funcionen en l'ordre següent. El contacte N/O K2 s'obre al circuit d'alimentació de la bobina de captació, però l'acció de bloqueig manté el contactor energitzat. Els contactes de tancament K2 es tanquen en el circuit d'alimentació de les dues bobines i en el circuit de la bobina KM2, preparant el circuit per a la seva posterior connexió. La bobina K2 es desactivarà tan bon punt s'alliberi el mecanisme de bloqueig de la bobina KM2. El motor es desconnecta de la xarxa elèctrica prement el botó SB1.La bobina K1 allibera el seu contacte d'obertura al circuit de la bobina KM2, que allibera el pestell i apaga la bobina KM1, després de la qual cosa el circuit torna a la seva posició original.