Nodes dels circuits de control automàtic en funció del temps
 Els electromagnètics, electrònics, motors i electropneumàtics s'utilitzen àmpliament en circuits d'automatització. relleu de temps... Els esquemes de conversió de durada del senyal més comuns es mostren a la fig. 1. Esquema fig. 1, i proporciona un pols d'una durada determinada, independentment de la durada del premsat botons SB. Després de prémer el botó SB, s'activa el relé K, que dóna un impuls per encendre el mecanisme. La durada del pols ve determinada pel retard de temps del relé KT. El botó SB es pot substituir per un relé de comandament KQ.
Els electromagnètics, electrònics, motors i electropneumàtics s'utilitzen àmpliament en circuits d'automatització. relleu de temps... Els esquemes de conversió de durada del senyal més comuns es mostren a la fig. 1. Esquema fig. 1, i proporciona un pols d'una durada determinada, independentment de la durada del premsat botons SB. Després de prémer el botó SB, s'activa el relé K, que dóna un impuls per encendre el mecanisme. La durada del pols ve determinada pel retard de temps del relé KT. El botó SB es pot substituir per un relé de comandament KQ.
Esquemes Fig. 8, b (amb relé de temps electromagnètic) i fig. 1, c (amb relé de temps electropneumàtic o motoritzat) s'utilitzen per subministrar un pols a curt termini després de l'inici de l'acció de l'interruptor de viatge SQ. En aquests i esquemes posteriors, en comptes de contactes interruptor de moviment Es poden utilitzar els contactes de relé KQ.
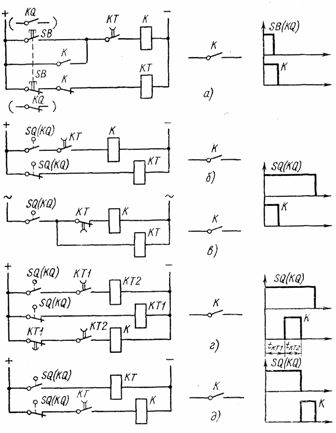
Arròs. 1. Circuits per convertir la durada dels senyals
Esquema fig.1d proporciona un pols de durada tKT2 amb un retard de temps tKT1 després de l'inici de l'acció de l'interruptor SQ.
El node del circuit Fig. 1, e. Si es requereix un retard tKT1 abans d'aplicar aquest pols, el circuit de la fig. 1, e. La durada del pols és tKT2.
En els circuits de control posicional, el circuit de la Fig. 1g, que realitza la funció d'emetre una ordre llarga després del final de l'impacte a l'interruptor SQ. L'ordre es cancel·la a l'inici d'una nova acció a l'interruptor SQ.
Es pot obtenir un curt retard (fins a 1,5 s) engegant i apagant de manera convencional relés intermedis a causa de la derivació de les seves bobines amb condensadors o díodes.
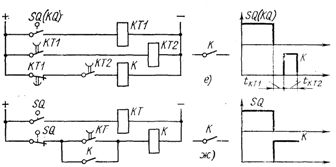
En el diagrama de la fig. 2, i quan el contacte KQ està tancat, el relé K s'activa amb un retard determinat pel temps de càrrega del condensador C. Quan KQ està tancat, el relé K també torna amb un retard a causa de la descàrrega del condensador.

Arròs. 2. Obtenció de retards de temps mitjançant la derivació de les bobines dels relés intermedis amb condensadors o díodes
Per obtenir un retard només quan el relé està encès, utilitzeu el circuit de la Fig. 2, b. El retard quan s'apaga el relé és pràcticament absent, ja que el condensador es descarrega ràpidament a la resistència R (la resistència de la resistència R és significativament menor que la resistència de la bobina del relé K). Un problema similar es resol amb el circuit de la fig. 2c, que utilitza un contacte d'obertura del relé KQ. El desavantatge d'aquest circuit és la pèrdua important d'energia a través de la resistència en absència de senyal.
L'esquema de la fig. 2d, on quan s'obre el contacte KQ, el relé K s'apaga amb un retard controlat per la resistència R.
Segons el diagrama de la fig. 2, es crea un retard de temps quan K està apagat després de tancar el contacte del relé de comandament KQ.
Si es requereix un lleuger retard en el retorn del relé K quan s'activa el relé de comandament KQ, el diagrama de la fig. 2, e, en què la bobina del relé K és derivada per un díode.
A la fig. 3, a. La durada del pols ve determinada pel retard de temps del relé KT2, la pausa es determina pel temps de retard del relé KT1.
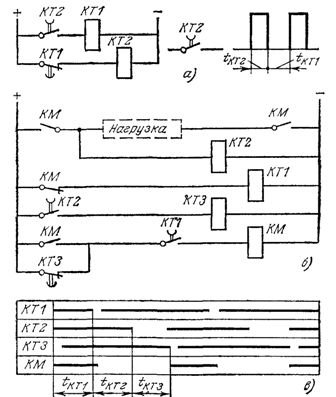
Arròs. 3. Circuits de relés per generar polsos
A la fig. 3, b, es dóna un diagrama de l'encesa periòdica del mecanisme amb un temps de pausa prolongat El temps d'encesa del contactor KM és igual al retard del relé KT1, la durada de la pausa és la suma dels retards del relé KT2 i KTZ. El diagrama de temps es mostra a la Fig. 3, c.
Esquemes de generadors d'impulsos de relés de temps o elements lògics (vegeu més avall) també s'utilitzen per regular la velocitat de funcionament dels mecanismes lineals. El controlador de temperatura també es va estendre, contenint un dispositiu de comandament KEP-12U, de moltes maneres similar a un relé de temporització del motor. La unitat té un motor executiu, engranatges variables, tambor de lleves, interruptor i 12 contactes.
Els reguladors de velocitat solen utilitzar l'esquema per al funcionament cíclic del dispositiu KEP-12U (Fig. 4, a). El circuit es realitza mitjançant els relés K1 i K2 i els contactes del dispositiu de comandament KT.1 i KT.2, l'esquema de circuit del qual es mostra a la fig. 4, b.
Abans de començar a treballar, enceneu l'interruptor S.Quan el contacte del relé KQ es tanca breument, donant una ordre per iniciar el cicle de treball, el relé K1 s'activa i s'enclava automàticament. El relé K2 s'activa en encendre el dispositiu de comandament KT. Els bobinatges del motor LM1 i LM2 s'activen i el tambor de lleves comença a girar. Els contactes de sortida del dispositiu KT.3, KT.4, etc., tancant-se seqüencialment, en els moments de temps establerts (vegeu el diagrama de la Fig. 4, b) donen ordres per encendre els mecanismes lineals. A la meitat del cicle, s'obre el contacte KT.1 i s'apaga el relé K1.
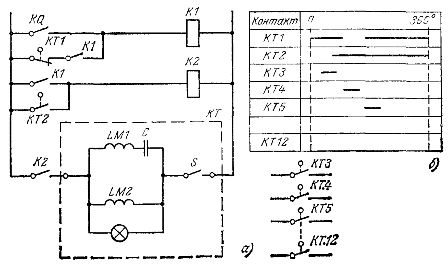
Figura 4. Controlador de velocitat de línia amb el dispositiu KEP-12U
La bobina de relé K2 suporta l'alimentació mitjançant el contacte del dispositiu KT.2. Després de girar el tambor en un angle de 360 °, el contacte KT.2 s'obre, el motor del dispositiu KEP-12U s'atura. La cadena està preparada per al proper cicle.
En conclusió, considerarem dos esquemes de control remot del retard dels relés de temps electromagnètics.
Per canviar el retard des del tauler de control, podeu utilitzar un circuit de relé de dues bobines amb bobines d'activació KT.1 i bobines de retorn KT. 2 (desmagnetització), els MDS dels quals estan dirigits en sentit contrari (Fig. 5, a). El MDS de la bobina d'alliberament s'ajusta mitjançant el potenciòmetre RP. Per evitar el funcionament repetit del TC després de retornar i disparar la inversió de magnetització, el MDS de la bobina d'activació ha de ser inferior al MDS suficient per tirar de l'induït, o s'ha d'introduir el seu propi contacte de tancament del relé a la bobina del circuit (Fig. 5, a).
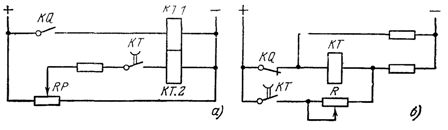
Figura 5. Esquemes d'ajust remot del retard del relé de temps
Segons el diagrama de la fig.5, b feu un canvi remot en el retard de temps d'un relé de bobina única. Quan el contacte KQ s'obre, la bobina del relé KT flueix amb un corrent de desmagnetització que està regulada per la resistència R. A mesura que augmenta el corrent de desmagnetització, el retard del relé disminueix i viceversa. Amb una tensió d'alimentació de 220 V, s'utilitza un relé amb una bobina per a una tensió nominal de 110 V.