Circuits de control del motor en funció de la carretera
 L'automatització direccional o el control en una funció de camí s'utilitza per limitar el moviment d'un mecanisme o aturar-lo en qualsevol punt intermedi o final de la ruta.
L'automatització direccional o el control en una funció de camí s'utilitza per limitar el moviment d'un mecanisme o aturar-lo en qualsevol punt intermedi o final de la ruta.
Les principals opcions per a cicles de treball controlats elements de l'automatització del ferrocarril, pot ser: apagada automàtica de l'accionament elèctric al final del cicle, marxa enrere amb limitació automàtica de la trajectòria de moviment de cada element de l'accionament sense temps de retenció i amb retenció als punts finals, marxa enrere amb aturada del mecanisme després de cada cicle o amb un llarg moviment de llançadora.
En els casos en què el mal funcionament de l'interruptor de límit pot provocar un accident, també s'instal·len interruptors de límit que apaguen el motor.
En circuits accionats, no es mostra la secció de potència amb arrencadors magnètics: els contactes principals del circuit d'alimentació són accionats: per la bobina KM amb un arrencador irreversible i les bobines KM1 i KM2 si l'arrencada és reversible
Els diagrames de la fig.a i b preveuen apagar el motor al final del moviment del mecanisme a través de l'interruptor de límit i només es diferencien entre si en la seva col·locació al circuit de control i les característiques funcionals resultants. En el primer circuit, el motor aturat pel final de carrera no es pot reiniciar en la mateixa direcció prement botó d'inici, en el segon esquema el mecanisme es pot continuar movent si es torna a prémer el botó.
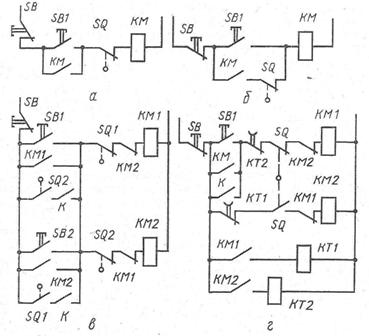
Arròs. Esquemes de control del motor en funció del viatge amb interruptors de final de carrera: a i b — aturada del motor al final del moviment del mecanisme, c — amb limitació del moviment del mecanisme, d — moviment cíclic amb retard de les posicions finals.
El circuit de control de la Fig. c preveu el moviment del mecanisme al llarg d'un recorregut limitat per dos interruptors de final de carrera SQ1 i SQ2, i el treball es pot dur a terme tant en moviments discrets com continus. En el primer cas, el mecanisme comença a avançar quan es prem el botó SB1 i es mou fins que prem el final de carrera SQ1. Per treure el mecanisme d'aquesta posició, premeu el botó SB2.
Els contactes d'obertura KM2 i KM1 en els circuits de les bobines KM1 i KM2 s'utilitzen per al bloqueig.

Per al funcionament cíclic del mecanisme amb diferents retards de temps en les posicions finals, el diagrama de la fig. d) En arrencar el motor cap endavant, el botó d'arrencada SB1 activa el relé de temps KT1 i obre el seu contacte en el circuit de la bobina del contactor KM2. El moviment continua fins que s'acciona l'interruptor SQ, que obre el circuit de la bobina del contactor KM1 i tanca el contacte SQ connectat mecànicament a aquesta. Però la inversió no es produeix immediatament, perquè el contacte d'obertura KT1 encara està obert.
El relé de temps KT1, desconnectat del contacte KM1, compta enrere el retard de temps establert i encén la bobina del contactor KM2, fent girar el motor.A través del contacte del bloc de tancament KM2, el relé de temps KT2 s'encén i trenca el circuit. de la bobina KM1 amb el contacte KT2. El motor elèctric s'encén i mou el mecanisme fins que s'acciona l'interruptor de final de carrera, després del qual el cicle es repeteix en el mateix ordre.
Si, segons les condicions de funcionament, només es requereix un retard en una posició final, un relé de temps i el seu contacte d'obertura s'apagaran al circuit de control.