Classificació dels sistemes de control automàtic

El conjunt de dispositius de control automàtic i objecte de control connectats i interactuant entre ells d'acord amb l'algorisme de control s'anomena sistema de control automàtic (ACS).
Els sistemes de control automàtic es poden classificar segons el mètode de control i les característiques funcionals. Segons el mètode de control, tots els sistemes es divideixen en dues grans classes: ordinaris (no autoregulables) i autoregulables (adaptatius).
Els sistemes ordinaris pertanyents a la categoria simple no modifiquen la seva estructura en el curs de la gestió. Són els més desenvolupats i utilitzats en foneries i tallers tèrmics. Els sistemes de control automàtic comuns es divideixen en tres subclasses: sistemes de control oberts, tancats i combinats.
Els sistemes de control automàtic de llaç obert, al seu torn, es divideixen en sistemes de control automàtic rígid (SZHU) i sistemes de control de pertorbacions.
En els primers sistemes, el regulador actua sobre l'objecte de control independentment del resultat obtingut, és a dir, del valor de la variable controlada i de la pertorbació externa. Els sistemes de control de pertorbacions funcionen segons el principi que l'acció de control es genera en funció de les pertorbacions externes que afecten l'objecte de control.
Com a exemple, considereu el sistema de calefacció d'una foneria o taller tèrmic. En aquest cas, el consum d'aigua calenta a la canonada de calefacció de la botiga depèn de les condicions meteorològiques externes. Com més fred fa fora, més aigua calenta es subministra als radiadors i viceversa.
Els sistemes de control automàtic tancats que funcionen segons el principi de deflexió també s'anomenen sistemes de control automàtic (ACS). La seva característica distintiva és la presència d'un cicle tancat de pas del senyal, és a dir, la presència d'un canal de retorn a través del qual es transmet informació sobre l'estat de la variable controlada a l'entrada de l'element de comparació.
Els sistemes de control automàtic estan dissenyats per resoldre tres problemes: estabilització del valor controlat (ATS estabilitzador), canvi del valor controlat segons programes coneguts (ATS programats) o desconeguts (ATS de seguiment).
En l'estabilització ATS, la consigna de la variable controlada és constant. Un exemple d'aquest sistema és el sistema de control de temperatura a l'espai de treball d'un forn tèrmic. En el programari ATS, el valor de la variable controlada canvia amb el temps segons un programa predissenyat (conegut).
En sistemes servo, el valor establert de la variable controlada canvia amb el temps segons un programa desconegut anteriorment.Els ATS de seguiment i programari es diferencien dels estabilitzadors pel principi de processament del senyal de referència.
L'exemple més típic de servocontrol és el manteniment automàtic d'una determinada relació entre el consum de combustible i l'aire quan es regula el procés de combustió en forns de fusió i calefacció de combustible.
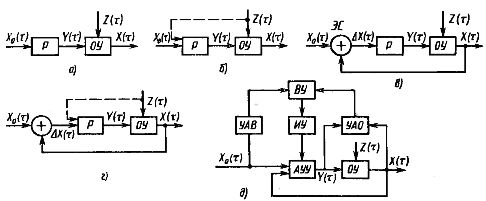
Sistemes de control automàtic: a — obert, b — biaix obert, c — tancat, d — combinat, d — autorregulador, P — controlador, OU — objecte de control, ES — element de comparació, UAV — dispositiu per a l'anàlisi de l'acció de control : VU - dispositiu informàtic, IU és un dispositiu executiu, AUU és un dispositiu de control automàtic, AUO és un dispositiu d'anàlisi d'objectes de control.
Els sistemes combinats combinen els avantatges dels sistemes de control de desviacions i pertorbacions, la qual cosa augmenta la precisió del control. L'efecte de les pertorbacions no explicades en sistemes combinats es compensa o atenua pel control de biaix.
Els sistemes autorregulats (adaptatius) es poden dividir en tres subclasses: sistemes extrems, sistemes d'autoajustament i sistemes d'autoajustament.
Els sistemes de regulació extrema s'anomenen sistemes d'estabilització, seguiment o control programat en què la configuració, el programa o la llei de reproducció canvien automàticament en funció dels canvis en les condicions externes o de l'estat intern del sistema per crear el mode de funcionament més favorable (òptim) de un objecte de control.
En aquests sistemes, en comptes d'una configuració o programa permanent, s'instal·la un dispositiu de cerca automàtica, que analitza cada característica de l'objecte (eficiència, productivitat, economia, etc.) i, en funció del resultat obtingut, proporciona el valor requerit d'un objecte. variable controlada al dispositiu de control, de manera que aquesta característica té un valor destacat amb un canvi continu de diverses influències pertorbadores que afecten les condicions de funcionament del sistema.
En sistemes amb paràmetres d'autoajustament, quan canvien les condicions externes o les característiques de l'objecte controlat, hi ha un canvi automàtic (no segons un programa predeterminat) en els paràmetres variables del dispositiu de control per garantir un funcionament estable del sistema i mantenir-lo. el valor controlat a un nivell determinat o òptim.
En sistemes amb estructura autoajustable, quan canvien les condicions i característiques externes de l'objecte de control, els elements de l'esquema de connexió es canvien o s'hi introdueixen nous elements. L'objectiu d'aquests canvis (elecció) de l'estructura és aconseguir una millor solució al problema de gestió.
La selecció de l'estructura es fa per cerca automàtica mitjançant operacions computacionals i lògiques. Aquests sistemes no només s'han d'adaptar a tots els canvis en les condicions externes i les característiques de l'objecte, sinó que també han de funcionar amb normalitat fins i tot en presència de mal funcionament o danys en elements individuals, creant nous circuits per substituir els trencats. Es poden fer sistemes d'autoregulació per millorar, "guanyar experiència" provant ràpidament diverses opcions, escollint i "recordant" la millor.
Classificació funcional tots els sistemes de control automàtic es divideixen en quatre classes:
-
sistemes de coordinació del treball dels mecanismes,
-
sistemes de regulació dels paràmetres dels processos tecnològics,
-
sistemes de control automàtic,
-
sistemes automàtics de protecció i bloqueig.

Sistemes dissenyats per coordinar el funcionament dels mecanismes individuals de la planta o de la planta en el seu conjunt sistemes de control rígid automàtic (SZHU).
Els processos tecnològics dels sistemes de control automàtic (ACS) asseguren el manteniment del valor controlat a un nivell determinat o el seu canvi segons un programa determinat.
Els sistemes de control automàtic (ACS) contenen mitjans i mètodes per obtenir informació sobre els valors actuals dels paràmetres tecnològics del procés (temperatura, pressió, pols o contingut de gas a l'aire, etc.) sense implicació humana directa.
Els sistemes de protecció automàtica (SAZ) i els sistemes de bloqueig (SAB) impedeixen l'ocurrència de situacions d'emergència quan els equips funcionen en estat estable.