Dispositius de control de velocitat del motor
Els motors elèctrics asíncrons s'utilitzen àmpliament en circuits de fre a contracorrent. relé de control de velocitat d'inducció... L'eix d'entrada del relé 5, sobre el qual està muntat un imant permanent cilíndric 4, està connectat a l'eix del motor elèctric, la velocitat angular del qual s'ha de controlar.
Quan el motor elèctric gira, el camp magnètic travessa els cables del curtcircuit 3 de l'estator rotatiu 6. S'indueix un EMF al bobinatge, el valor del qual és proporcional a la velocitat angular de gir de l'eix. Sota la seva influència, apareix un corrent a la bobina i sorgeix una força d'interacció, que tendeix a fer girar l'estator 6 en el sentit de gir de l'imant.
A una certa velocitat de rotació, la força augmenta tant que el limitador 2, superant la resistència de la molla plana, commuta els contactes del relé. El relé està equipat amb dos nodes de contacte: 1 i 7, que es commuta en funció del sentit de gir.
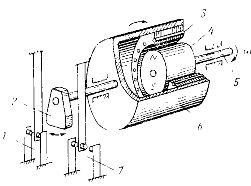
Figura 1. Relé de control de velocitat inductiu
Un relé de control de velocitat d'inducció té un disseny força complex i una precisió baixa que només pot ser acceptable per a sistemes de control gruixut. Es pot aconseguir una major precisió de regulació de la velocitat utilitzant un tacogenerador, una micromàquina de mesura, la tensió als terminals de la qual és directament proporcional a la velocitat de rotació.
Els generadors de tacó s'utilitzen en sistemes de retroalimentació d'accionament de velocitat variable amb un ampli rang de rpm i, per tant, tenen un error d'un petit percentatge. Els més comuns són els tacogeneradors de corrent continu.
A la fig. La figura 2 mostra un esquema d'un relé de control de velocitat per a un motor elèctric M que utilitza un tacogenerador G, el circuit de l'induït inclou un relé electromagnètic K i un reòstat regulador R. Quan la tensió als terminals de l'induït del tacogenerador supera la tensió de funcionament, el relé està encès al circuit extern.
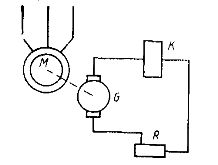
Figura 2. Relé de control de velocitat amb tacogenerador
 Figura 3. Esquema d'un pont de tacòmetre
Figura 3. Esquema d'un pont de tacòmetre
A mesura que augmenta la resistència del circuit de l'induït, augmenta la precisió del circuit. Per tant, de vegades el relé està connectat al tacogenerador mitjançant un amplificador de semiconductor intermedi. També és possible utilitzar elements de llindar semiconductors sense contacte amb una tensió de resposta estable per a aquest propòsit.
La fiabilitat del circuit es pot millorar si el tacogenerador de CC es substitueix per un tacogenerador asíncron sense contacte.
Un tacogenerador asíncron té un rotor buit no magnètic fet en forma de vidre. L'estator té dos bobinatges amb un angle de 90 ° entre si. Una de les bobines està connectada a una xarxa de corrent altern.S'elimina una tensió sinusoïdal de l'altre bobinat, que és proporcional a la velocitat del rotor. La freqüència de la tensió de sortida és sempre igual a la freqüència de la xarxa.
 En els motors executius de corrent continu moderns, el tacogenerador està integrat a la mateixa carcassa que la màquina i està muntat al mateix eix que el motor principal. Això redueix la ondulació de la tensió de sortida i millora la precisió de la regulació de la velocitat.
En els motors executius de corrent continu moderns, el tacogenerador està integrat a la mateixa carcassa que la màquina i està muntat al mateix eix que el motor principal. Això redueix la ondulació de la tensió de sortida i millora la precisió de la regulació de la velocitat.
Els tacogeneradors de corrent continu tipus PT-1 amb excitació electromagnètica s'utilitzen habitualment als motors elèctrics de la sèrie PBST. Parell elevat Motors de corrent continu Tinc un tacho excitat amb imant permanent integrat.
En els casos en què el motor de corrent continu M no disposa de tacogenerador, la seva velocitat es pot controlar mesurant la EMF de l'induït. Per a això, s'utilitza un circuit pont taquimètric, que està format per dues resistències: R1 i R2, induït Ri i pols addicionals de la màquina Rdp. Tensió de sortida del pont del tacòmetre Uout = U1 — Udp, o
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
L'última igualtat és vàlida amb la condició que el flux magnètic del motor elèctric sigui constant. Incloent un element llindar a la sortida del pont taquimètric, s'obté un relé que s'ajusta a una determinada velocitat angular de gir. La precisió del pont del tacòmetre és baixa a causa de la variabilitat de la resistència de contacte del raspall i el desequilibri de calefacció de la resistència.
Si el motor de corrent continu funciona amb una característica artificial i s'inclou una gran resistència addicional a l'induït, la funció del relé de velocitat es pot dur a terme mitjançant un relé de tensió connectat als terminals de l'induït.
Tensió a l'induït del motor elèctric Uja = E + IjaRja.
Com que I = (U — E) / (Ri + Rext), obtenim Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, llavors el segon terme es pot descuidar i la tensió terminal de l'induït es pot considerar directament proporcional a la fem i la velocitat de gir del motor.
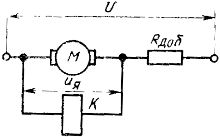
Figura 4. Control de velocitat amb relés de tensió
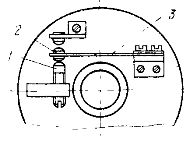 Figura 5. Relé de control de velocitat centrífug
Figura 5. Relé de control de velocitat centrífug
Tenen un disseny molt senzill. interruptors de velocitat centrífugs... La base del relé és una placa frontal de plàstic 4, muntada sobre un eix, la velocitat de gir del qual s'ha de controlar. A la placa frontal es fixen una molla plana 3 amb un contacte mòbil massiu 2 i un contacte ajustable fix 1. La molla està feta d'acer especial, el mòdul d'elasticitat del qual és pràcticament independent dels canvis de temperatura.
Quan la placa frontal gira, una força centrífuga actua sobre el contacte mòbil, que a una certa velocitat de gir supera la resistència de la molla plana i canvia els contactes. El corrent es subministra al dispositiu de contacte mitjançant anelles i raspalls, no mostrats a la figura. Aquests relés s'utilitzen en sistemes d'estabilització de velocitat per a micromotors de corrent continu. Malgrat la seva senzillesa, el sistema manté la velocitat amb un error de l'ordre del 2%.
