Un exemple d'elaboració d'un diagrama de temps i un diagrama de blocs del funcionament dels mecanismes
En els esquemes de control de les línies tecnològiques, l'estat dels elements de sortida, és a dir. actuadors (relés electromagnètics, arrencadors magnètics, relés d'estat sòlid, etc.), ve determinat no només per la combinació d'elements d'entrada o recepció (botons, sensors, etc.), sinó també per la seqüència del seu canvi en el temps.
Es pot presentar una descripció verbal del procés tecnològic dissenyat en forma d'un programa de canvis en els senyals d'entrada i sortida, que s'anomena diagrama de temps del procés tecnològic.

Es farà un exemple de construcció d'un diagrama de temps basat en un diagrama de línies de pre-neteja de gra.
Descripció del funcionament del circuit
Mitjançant l'interruptor SA1, es selecciona el mode de funcionament: automàtic — el mode de funcionament principal, manual — el mode de posada en marxa.
El mode de posada en marxa consisteix a subministrar energia mitjançant els botons de bloqueig SB4-SB6 a les bobines dels arrencadors magnètics dels mecanismes lineals, obviant tota lògica de control. En aquest mode, el propi operador decideix la longitud de la línia o algun mecanisme independent, el control de l'ompliment de la tremuja es realitza només visualment.
Per regla general, aquest mode de funcionament s'utilitza en modes d'operació d'emergència, quan la lògica de control es trenca i és necessari completar el procés tecnològic sense perdre el producte a la línia, o durant la posada en servei, quan després de la reparació d'algun mecanisme. a la línia, només cal iniciar-la, no tots els mecanismes lineals.
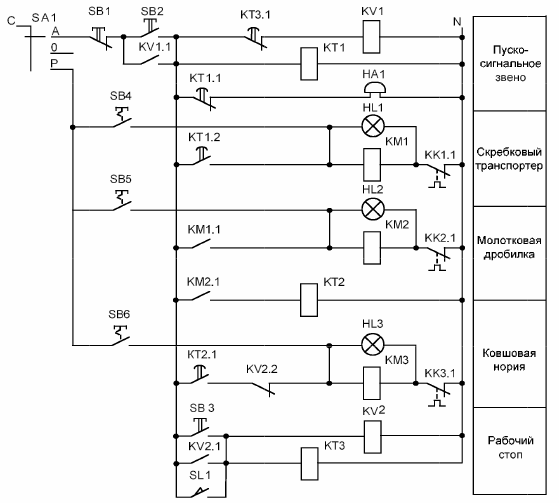
Arròs. 1. Circuit de control de relé-contacte de la línia de pre-neteja de gra
Després de l'interruptor del mode de funcionament, s'inclou al circuit de control un bloc de senyalització d'arrencada que permet, amb un retard temporal, apagar la campana i encendre simultàniament el transportador rascador. Quan es componen circuits de relé-contacte, la seqüència d'encesa o apagat dels mecanismes es realitza mitjançant els contactes de tancament dels arrencadors magnètics.
Així, en el nostre cas, si hi ha energia a la bobina de l'arrencada magnètica KM1 (transportador de rascador), respectivament, mitjançant el contacte KM1.1, la potència també estarà a la bobina de l'arrencada magnètica KM2 (martell).
Al mateix temps, no és pràctic iniciar tots els mecanismes de la línia, perquè durant el funcionament es pot produir aquest mode de funcionament quan els accionaments elèctrics dels dos mecanismes de la línia encara no han arribat al seu mode de funcionament nominal i el producte està se'ls lliura a través del mecanisme del capçal, donant lloc a una parada d'emergència de la línia. Per tant, al circuit de control, es subministra energia a la bobina de l'arrencada magnètica KM3 del mecanisme de capçal amb un retard de temps realitzat pel relé de temps KT2.
Els mecanismes lineals estan activats, el treball està en curs. De vegades, durant el funcionament, arriba un moment en què la tremuja encara no està plena i la línia s'ha d'apagar. En aquest cas, a l'esquema de control s'utilitza un bloc de "parada de treball", que permet desactivar tots els mecanismes de la línia en la seqüència correcta (en la direcció del moviment del producte al llarg de la línia).
Així, quan es prem el botó SB3, s'encén el relé intermedi KV2, el contacte d'obertura del qual KV2.2 trenca el circuit amb la bobina KM3, el mecanisme del cap de línia s'apaga. Al mateix temps, el relé de temps KT3 elabora un informe sobre el temps de funcionament de la línia per netejar els mecanismes del producte.
Passat un cert temps, el contacte del relé de temps KT3.1 trenca el circuit amb el relé intermedi KV1, el contacte del qual passa per alt el botó d'arrencada. Això fa que tot el circuit de control s'aturi i, com a resultat, s'aturin els mecanismes lineals. Un algorisme similar per al funcionament del circuit de control quan s'activa el sensor de nivell a la tremuja SL1.
La protecció dels motors elèctrics lineals de la sobrecàrrega en l'esquema de control presentat es realitza mitjançant contactes d'interrupció dels relés tèrmics KK1.1 ... KK3.1, que s'instal·len respectivament en sèrie en circuits amb bobines d'arrencadors magnètics KM1 .. .KM3.
Per al control visual del funcionament dels mecanismes lineals en el circuit de control hi ha llums indicadores HL1 ... HL3. En el funcionament normal dels mecanismes lineals, els llums indicadors s'encendran. En cas d'aturada d'emergència, la potència del circuit amb l'arrencada magnètica desapareix i el llum indicador s'apaga en conseqüència.
Segons l'esquema del mode de funcionament automàtic elèctric principal, es necessiten 3 botons per a la línia de pre-neteja de gra: SB1 «Stop», SB2 «Start» i SB3 «Work Stop», així com un sensor de nivell SL1. Així tenim 4 elements d'entrada. A més, s'accepten botons amb autodevolució, és a dir. sense arreglar l'estat d'encesa.
Un exemple de construcció d'un diagrama de temps
Elements de sortida 4: campana HA1, cinta transportadora rascadora KM1, trituradora de martells KM2 i elevador de galledes KM3.
Quan es prem el botó «Inici» de l'SB2, s'ha d'activar el primer enllaç de disparador (campana HA1) durant 10 segons per advertir al personal que la línia de procés està a punt d'iniciar-se.
Després de sonar el timbre d'HA1, és a dir. 10 segons després de prémer el botó "Inici" SB2 86, s'encenen el transportador rascador KM1 i la trituradora d'impacte KM2 (vegeu fig. 2).
El temps de treball dels mecanismes es determina en funció de la seva productivitat i volum de producció.La productivitat de la cinta transportadora, la trituradora de martells i l'elevador de galledes és de 5 t / h, 3 t / h i 2 t / h respectivament. Es determina el volum de gra. en funció del volum de la tremuja i d'un quilogram de gra per 1 m3.
El gra de diferents conreus té una forma, densitat i pes corresponents diferents, per tant un metre cúbic de cada tipus de gra no pot pesar el mateix.
Prenem el volum del búnquer de 5 m. El gra carregat és blat sarraí, que pesa 560 - 660 kg. L'estat inicial de la paperera de reciclatge és buit. Aleshores, la quantitat de gra en un recipient ple: N = 580 x 5 = 2900 kg.
L'elevador de galledes té la productivitat més baixa de tots els mecanismes; també subministra gra a la línia. El seu temps de treball serà: Tm3 = 2000/2900 = 0,689 h = 41 min.
El temps de funcionament de la resta de mecanismes serà superior a 41 minuts i es determina en funció de la lògica del circuit.
Després d'encendre el transportador rascador KM1 i la trituradora d'impacte KM2, cal donar-los temps per accelerar. Es pren el temps d'acceleració de tots els mecanismes: 10 segons. L'elevador de galledes KM3 s'engega l'últim (10 segons després d'iniciar KM1 i KM2) per no crear un bloqueig de producte a la trituradora de martells KM2 i al transportador rascador KM1. Passats 41 minuts, tot el producte necessari per omplir la tremuja passarà per l'elevador de galledes KM3.
El sensor de nivell SL s'instal·la de manera que el senyal d'ompliment de la tremuja es rep fins i tot abans que els residus de producte passin a través de la trituradora de martells KM2 i la cinta transportadora del rascador KM1.
Quan s'acciona el sensor de nivell SL1, el mecanisme del capçal KM3 s'apaga (al cap de 41 minuts i 20 segons després de prémer el botó «Inici» SB2). Amb un retard, el KM1 i el KM2 s'apaguen simultàniament. Aquest retard pot suposar-se igual a 20 segons.
El diagrama de temps per al funcionament normal es mostra a la figura 2.
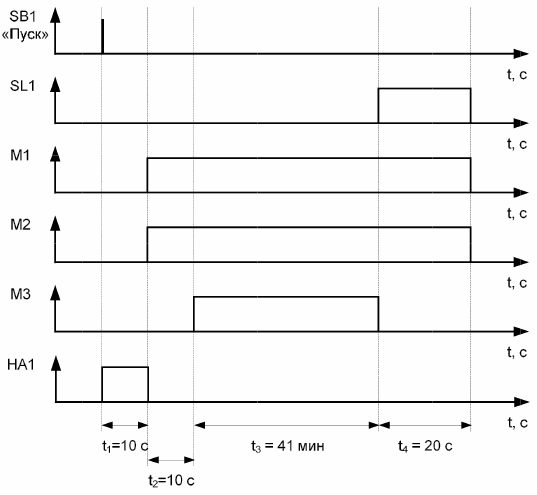
Arròs. 2. Diagrama de temps per al funcionament normal
En el mode «Aturada d'operació», l'operador pot aturar el procés abans d'activar el sensor de nivell SL1, per tant, en aquest cas és impossible determinar el temps de funcionament dels mecanismes. En el mode «Parada general», tots els mecanismes es desactiven immediatament.
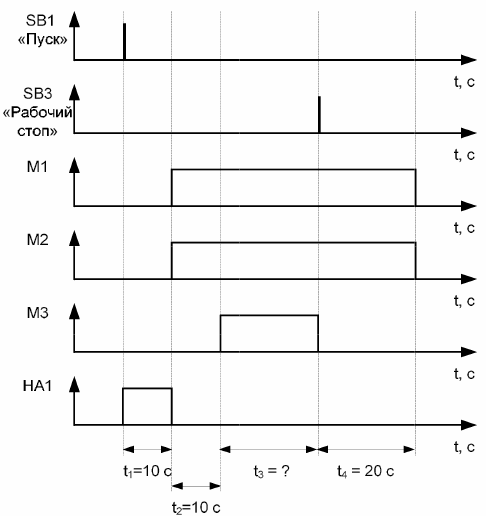
Arròs. 3. Cronograma de la modalitat de funcionament «Aturada de funcionament».
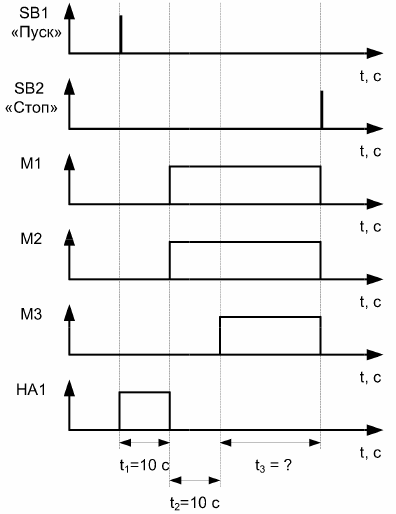
Arròs. 4. Cronograma de la modalitat «Total stop».
Un exemple de construcció d'un diagrama de blocs del funcionament dels mecanismes
El diagrama de blocs del procés tecnològic ha de mostrar clarament l'algorisme del seu treball, per a això s'utilitzen designacions especials de determinades accions.
La figura 5 mostra un exemple de diagrama de blocs per a una línia de preneteja de gra. El diagrama de blocs presentat mostra totes les opcions possibles per al funcionament del procés tecnològic. La situació "Accident" pot ocórrer en qualsevol moment durant el funcionament de la línia de pre-neteja de gra després de prémer el botó "Inici" SB2.
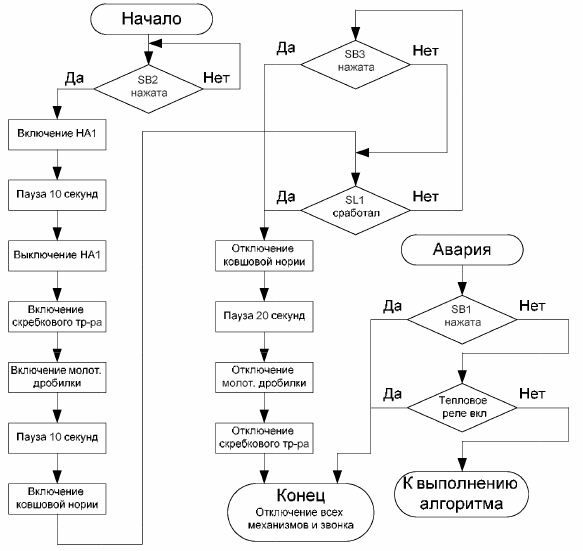
Arròs. 5. Esquema de blocs de la línia de pre-neteja de gra