Col·locació de dispositius compensatoris a les xarxes de distribució de les empreses
 En triar i col·locar mitjans de compensació de potència reactiva als sistemes d'alimentació d'empreses industrials, es distingeixen dos grups de xarxes industrials, depenent de la composició de les seves càrregues:
En triar i col·locar mitjans de compensació de potència reactiva als sistemes d'alimentació d'empreses industrials, es distingeixen dos grups de xarxes industrials, depenent de la composició de les seves càrregues:
-
el primer grup: xarxes de propòsit general, xarxes amb mode de seqüència directa de la freqüència principal de 50 Hz,
-
el segon grup: xarxes amb càrregues específiques no lineals, asimètriques i fortament variables.
Solució del problema compensació de la potència reactiva per al segon grup hi ha una sèrie de característiques, inclosa la necessitat de proporcionar indicadors de qualitat d'energia per a receptors elèctrics amb la velocitat requerida.
En el disseny, les empreses de potència activa i reactiva calculades més grans Rcalc i Qcalc, que indiquen el factor de la potència natural.
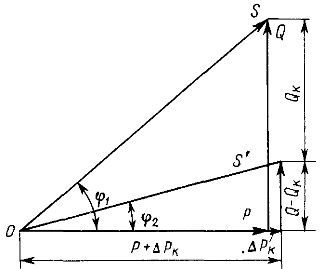
Esquema de funcionament del dispositiu compensador
Per determinar la potència dels dispositius compensadors, no s'utilitza la potència calculada Qcalculated., i el valor més petit Qswing tenint en compte la discrepància en el temps entre la càrrega activa més alta del sistema d'alimentació i la potència reactiva més alta de l'empresa industrial. Aquesta discrepància es té en compte pel coeficient d'oscil·lació, els valors del qual, depenent de la indústria a la qual pertany l'empresa, varien entre 0,75 i 0,95. Aleshores Qswing = swing Qcalc
Els valors de la càrrega activa més alta Pcalc i el Qmax reactiu total es tenen en compte al sistema d'alimentació per determinar el valor de la potència reactiva econòmica òptima que el sistema d'alimentació pot transferir a la companyia en els modes més alt i més baix. càrrega activa del sistema elèctric, respectivament Qe1 i Qe2.
Per potència QNSl es determina la potència total dels dispositius compensadors QNS = QmaNS -Qe1, i per potència QNS2 — part ajustable dels dispositius compensadors QNSreg=Qe1 — Qe2
Els dispositius compensadors instal·lats als busos de baixa tensió de les principals subestacions reductores (GSP) de l'empresa no només garanteixen el manteniment del factor de potència del sistema cosφsyst, sinó que també redueixen la potència dels transformadors de potència GPP Str:

Aquests dispositius compensadors poden ser compensadors síncrons, bancs de condensadors i motors síncrons.
Els compensadors síncrons només s'instal·len a les plantes de transmissió de gas de grans empreses industrials d'acord amb el sistema de subministrament d'energia, mentre que els compensadors síncrons es troben a l'equilibri del sistema d'alimentació i s'utilitzen quan cal (per exemple, en cas de fallades del sistema) com a còpia de seguretat. font de potència reactiva. Per tant, la seva instal·lació a les xarxes del primer grup és limitada.
Els motors síncrons d'alta tensió (motors de compressor, estacions de bombeig, etc.) es tenen en compte en el balanç general de potència reactiva de l'empresa, però, per regla general, la seva potència reactiva no és suficient i, a continuació, la potència reactiva que falta s'omple amb bancs de condensadors.

El balanç de potència reactiva en un node de 6-10 kV d'una planta industrial es pot escriure com la relació següent:
Qvn + Qtp + ΔQ — Qsd — Qkb — Qe1 = 0,
on Qvn és la càrrega reactiva calculada dels receptors d'alta tensió (HV) 6 — 10 kV, Qtp és la potència de càrrega no compensada Qn xarxes de fins a 1 kV alimentades per transformadors de les subestacions transformadores de taller (TS), ΔQ - pèrdues de potència reactiva en el xarxa 6 — 10 kV, especialment en transformadors GPP.
L'ús de condensadors per a tensions de 6 a 10 kV redueix el cost de la compensació de potència reactiva, ja que els condensadors de baixa tensió solen ser més cars (per kvar de potència).
A les xarxes de baixa tensió (fins a 1 kV) d'empreses industrials, a les quals estan connectats la majoria dels receptors d'electricitat que consumeixen potència reactiva, el factor de potència de càrrega està en el rang de 0,7 a 0,8. Aquestes xarxes estan elèctricament més allunyades de les fonts del sistema elèctric o de la cogeneració local (CHP).Per tant, per reduir els costos de transmissió de potència reactiva, els dispositius compensadors es troben directament a la xarxa fins a 1 kV.

A les empreses amb càrregues específiques (xoc, molt variable), a més dels dispositius de compensació esmentats anteriorment, a les xarxes del segon grup s'utilitzen dispositius de compensació de filtres, d'equilibri i d'equilibri de filtres. Recentment, en lloc de compensadors rotatius, s'utilitzen cada cop més compensadors de potència reactiva estàtica (STK), que, juntament amb la millora del factor de potència, permeten estabilitzar la tensió d'alimentació.
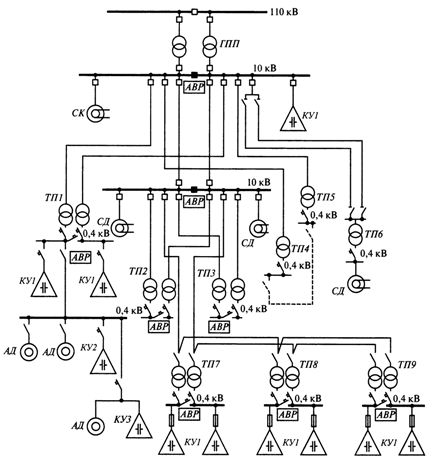
Arròs. 1. Col·locació de dispositius de compensació a les xarxes de subministrament d'alimentació d'una empresa industrial: GPP — la principal subestació reductora de l'empresa, SK — compensador síncron, ATS — interruptor de transferència automàtica, KU1 — KB per a la compensació centralitzada de potència reactiva, KU2 — KB per a la compensació grupal de la potència reactiva, KU3 — KB per a la compensació de la potència reactiva individual, TP1 -TP9 — subestacions transformadores de taller, SD — motors síncrons, AD — motors asíncrons
A les xarxes de serveis de la majoria d'empreses, s'utilitzen bancs de condensadors estàtics per a la regulació de la potència reactiva. En aquest cas, es realitza una compensació de potència reactiva centralitzada (KU1), grupal (KU2) o individual (KU3).
Així, les fonts de potència reactiva en el sistema d'alimentació d'una planta industrial que s'utilitzen per compensar la potència reactiva es poden localitzar tal com es mostra a la Fig. 1.