Sensors potenciomètrics
Un sensor de potenciòmetre és una resistència variable a la qual s'aplica una tensió d'alimentació, el seu valor d'entrada és el desplaçament lineal o angular del contacte captador de corrent i el valor de sortida és la tensió presa per aquest contacte, que canvia de magnitud a mesura que es troba en la seva posició. canvis.
Els sensors potenciomètrics estan dissenyats per convertir els desplaçaments lineals o angulars en un senyal elèctric, així com per reproduir les dependències funcionals més senzilles en dispositius automàtics i automàtics de tipus continu.
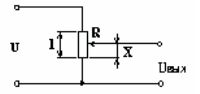 Diagrama de connexió del sensor potenciomètric
Diagrama de connexió del sensor potenciomètric
Per resistència, els sensors potenciomètrics es divideixen en
-
làmines amb resistència constant;
-
bobina de filferro amb bobinatge continu;
-
amb una capa resistiva.

Es van utilitzar sensors potenciomètrics lamel·lars per dur a terme mesures relativament gruixudes a causa de certs defectes de disseny.
En aquests sensors, les resistències constants, seleccionades nominalment d'una manera especial, es solden a les làmines.
La làmina és una estructura amb elements conductors i no conductors alternatius sobre els quals llisca el contacte del col·lector.Quan el col·lector de corrent es mou d'un element conductor a un altre, la resistència total de les resistències connectades a ell canvia en una quantitat corresponent al valor nominal d'una resistència. El canvi de resistència es pot produir en un ampli rang. L'error de mesura està determinat per la mida dels coixinets de contacte.
Sensor de potenciòmetre lamel·lar
Els sensors del potenciòmetre de filferro estan dissenyats per a mesures més precises. Per regla general, els seus dissenys són un marc fet de getinax, textolita o ceràmica, sobre el qual s'enrotlla un cable prim en una capa, gira en un gir, sobre la superfície neta de la qual llisca un col·lector de corrent.
El diàmetre del cable determina classe de precisió sensor del potenciòmetre (l'alt és de 0,03-0,1 mm, el baix és de 0,1-0,4 mm). Materials de filferro: manganina, fechral, aliatges a base de metalls nobles. L'anell antilliscant està fet d'un material més suau per evitar que el filferro s'esfriqui.
Els avantatges dels sensors de potenciòmetre:
-
senzillesa del disseny;
-
petita mida i pes;
-
alt grau de linealitat de les característiques estàtiques;
-
estabilitat de les característiques;
-
possibilitat de funcionament amb corrent altern i corrent continu.
Desavantatges dels sensors del potenciòmetre:
-
la presència d'un contacte lliscant, que pot causar danys a causa de l'oxidació de la traça de contacte, el fregament dels girs o la flexió del control lliscant;
-
error en el funcionament a causa de la càrrega;
-
factor de conversió relativament petit;
-
llindar de sensibilitat alt;
-
la presència de soroll;
-
susceptibilitat a l'erosió elèctrica sota la influència de descàrregues d'impuls.

Característica estàtica dels sensors potenciomètrics
Característica estàtica d'un sensor potenciomètric irreversible
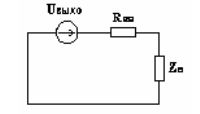
Considerem com a exemple un sensor de potenciòmetre amb una bobina contínua. Als terminals del potenciòmetre s'aplica una tensió CA o CC U. El valor d'entrada és el desplaçament X, el valor de sortida és la tensió Uout. Per al mode inactiu, la característica estàtica del sensor és lineal perquè la relació és certa: Uout = (U / R) r,
on R és la resistència de la bobina; r és la resistència d'una part de la bobina.
Donat que r / R = x / l, on l és la longitud total de la bobina, obtenim Uout = (U / l) x = Kx [V / m],
on K és el coeficient de conversió (transmissió) del sensor.
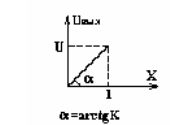
Òbviament, aquest sensor no respondrà a un canvi en el signe del senyal d'entrada (el sensor és irreversible). Hi ha esquemes que són sensibles als canvis de signatures. La característica estàtica d'aquest sensor té la forma que es mostra a la figura.
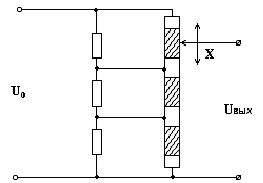
Circuit reversible d'un sensor de potenciòmetre
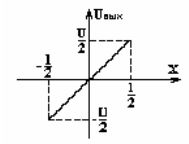
Característica estàtica d'un sensor potenciomètric reversible
Les característiques ideals resultants poden diferir significativament de les reals a causa de la presència de diversos tipus d'errors:
1. Zona morta.
La tensió de sortida varia discretament d'una volta a una altra, és a dir. aquesta zona es produeix quan, per a un valor d'entrada petit, Uout no canvia.
La magnitud del salt de tensió ve determinada per la fórmula: DU = U / W, on W és el nombre de voltes.
El llindar de sensibilitat ve determinat pel diàmetre del cable de la bobina: Dx = l / W.
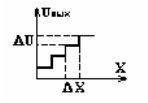
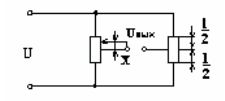
Sensor potenciomètric per banda morta
2. Irregularitat de les característiques estàtiques a causa de la variabilitat del diàmetre del fil, la resistència i el pas del bobinat.
3. Un error de joc que s'ha produït entre l'eix de gir del motor i la màniga guia (s'utilitzen molles de compressió per reduir-lo).
4.Error per fricció.
A baixes potències de l'element que condueix el raspall del sensor del potenciòmetre, es pot produir una zona d'estancament a causa de la fricció.
La pressió del raspall s'ha d'ajustar amb cura.
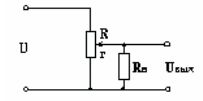
5. Error per influència de càrrega.
Depenent de la naturalesa de la càrrega, es produeix un error, tant en mode estàtic com dinàmic. Amb una càrrega activa, la característica estàtica canvia. El valor de la tensió de sortida es determinarà segons l'expressió: Uout = (UrRn) / (RRn + Rr-r2)
Aquests. Uout = f (r) depèn de Rn. Amb Rn >> R es pot demostrar que Uout = (U / R) r;
quan Rn és aproximadament igual a R, la dependència és no lineal i l'error màxim del sensor serà quan el control lliscant es desvia de (2/3))l. Normalment escolliu Rн / R = 10 … 100. La magnitud de l'error a x = (2/3) l es pot determinar amb l'expressió: E = 4/27η, on η= Rн / R — factor de càrrega.
Sensor potenciomètric sota càrrega
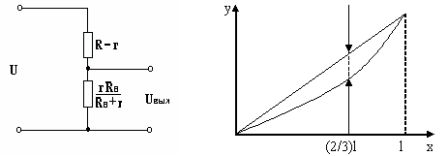 a — Circuit equivalent d'un sensor potenciomètric amb una càrrega, b — Influència de la càrrega sobre la característica estàtica del sensor potenciomètric.
a — Circuit equivalent d'un sensor potenciomètric amb una càrrega, b — Influència de la càrrega sobre la característica estàtica del sensor potenciomètric.
Característiques dinàmiques dels sensors potenciomètrics
Funció de transmissió
Per derivar la funció de transferència, és més convenient prendre el corrent de càrrega com a valor de sortida; es pot determinar mitjançant el teorema del generador equivalent. B = Uout0 / (Rvn + Zn)
Considereu dos casos:
1. La càrrega és purament activa Zn = Rn perquè Uout0 = K1x In = K1x / (Rin + Rn)
on K1 és la velocitat de ralentí del sensor.
Aplicant la transformada de Laplace, obtenim la funció de transferència W (p) = In (p) / X (p) = K1 / (Rin + Rn) = K
D'aquesta manera, hem obtingut una connexió sense inercia, la qual cosa significa que el sensor té totes les característiques de freqüència i temps corresponents a aquesta connexió.
Circuit equivalent
2. Càrrega inductiva amb un component actiu.
U = RvnIn + L (dIn / dt) + RnIn
Aplicant la transformada de Laplace, obtenim Uoutx (p) = In (p) [(Rvn + pL) + Rn]
Mitjançant transformacions, es pot arribar a una funció de transferència de la forma W (p) = K / (Tp + 1) — una connexió aperiòdica de primer ordre,
on K = K1 / (Rvn + Rn)
T = L / (Rvn + Rn);
Soroll intern del sensor del potenciòmetre
 Com es mostra, a mesura que el raspall es mou d'un torn a un altre, la tensió de sortida canvia bruscament. L'error creat pel pas és en forma de tensió de dent de serra superposada a la tensió de sortida de la funció de transferència, és a dir. és soroll. Si el raspall vibra, el moviment també genera soroll (interferència). L'espectre de freqüències del soroll vibracional es troba en el rang de freqüències d'àudio.
Com es mostra, a mesura que el raspall es mou d'un torn a un altre, la tensió de sortida canvia bruscament. L'error creat pel pas és en forma de tensió de dent de serra superposada a la tensió de sortida de la funció de transferència, és a dir. és soroll. Si el raspall vibra, el moviment també genera soroll (interferència). L'espectre de freqüències del soroll vibracional es troba en el rang de freqüències d'àudio.
Per eliminar les vibracions, els pantògrafs estan fets de diversos cables de diferents longituds plegats entre si. Aleshores, la freqüència natural de cada cable serà diferent, això evita l'aparició de ressonància tècnica. El nivell de soroll tèrmic és baix, es tenen en compte en sistemes especialment sensibles.
Sensors potenciomètrics funcionals
Cal tenir en compte que en l'automatització les funcions de transferència funcional s'utilitzen sovint per obtenir dependències no lineals i es construeixen de tres maneres:
-
canviar el diàmetre del cable al llarg de la bobina;
-
canvi de pas de la bobina;
-
l'ús d'un marc amb una configuració determinada;
-
maniobrant les seccions de potenciòmetres lineals amb resistències de diferents mides.
Per exemple, per obtenir una dependència quadràtica segons el tercer mètode, cal canviar l'amplada del marc de manera lineal, tal com es mostra a la figura.
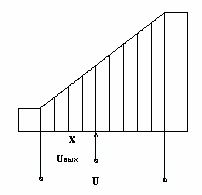
Sensor de potenciòmetre funcional
Potenciòmetre de múltiples voltes
Els sensors de potenciòmetre convencionals tenen un rang de funcionament limitat. El seu valor ve determinat per les dimensions geomètriques del marc i el nombre de voltes de la bobina. No poden augmentar indefinidament. Per tant, els sensors de potenciòmetres multigirs han trobat aplicació, on un element resistiu es retorça en una línia espiral amb diverses voltes, el seu eix s'ha de girar diverses vegades perquè el motor es mogui d'un extrem a l'altre de la bobina, és a dir. el rang elèctric d'aquests sensors és múltiple de 3600.
El principal avantatge dels potenciòmetres multigirs és la seva alta resolució i precisió, que s'aconsegueix a causa de la gran longitud de l'element resistiu amb petites dimensions globals.
Fotopotenciómetres
Fotopotenciómetre: és un anàleg sense contacte d'un potenciòmetre convencional amb una capa resistiva, el contacte mecànic es substitueix per un de fotoconductor, que, per descomptat, augmenta la fiabilitat i la vida útil. El senyal del fotopotenciómetre està controlat per una sonda de llum que actua com a lliscant. Està format per un dispositiu òptic especial i es pot desplaçar com a resultat de l'acció mecànica externa al llarg de la capa fotoconductora. En el punt on s'exposa la fotocapa es produeix un excés de fotoconductivitat (en comparació amb la fosca) i es produeix un contacte elèctric.
Els fotopotenciómetres es divideixen per finalitat en lineals i funcionals.
Els fotopotenciòmetres funcionals permeten convertir el moviment espacial de la font de llum en un senyal elèctric amb una forma funcional determinada a causa de la capa resistiva perfilada (hiperbòlica, exponencial, logarítmica).