Sensors sense contacte per a la posició dels mecanismes
 En aquest article parlarem dels sensors de posició dels mecanismes. Bàsicament, la funció principal de qualsevol sensor és donar un senyal quan es produeix un esdeveniment concret. És a dir, quan es produeix un esdeveniment d'activació, el sensor s'activa i genera un senyal, que pot ser analògic o discret, digital.
En aquest article parlarem dels sensors de posició dels mecanismes. Bàsicament, la funció principal de qualsevol sensor és donar un senyal quan es produeix un esdeveniment concret. És a dir, quan es produeix un esdeveniment d'activació, el sensor s'activa i genera un senyal, que pot ser analògic o discret, digital.
Els sensors de límit s'han utilitzat com a sensors de posició durant moltes dècades. interruptors. Consten de contactes elèctrics que s'obren o tanquen mecànicament quan alguna variable (posició) arriba a un valor determinat. Els interruptors de final de carrera de diversos tipus són una part important de molts sistemes de control, la fiabilitat dels quals depèn d'ells. aquests sensors contenen elements mecànics en moviment els recursos dels quals són limitats.
Actualment, els interruptors de límit estan sent substituïts activament per diversos sensors de proximitat. Sovint sensors de proximitat dels següents tipus: inductiu, generador, magnetohercon i fotoelectrònica. Aquests sensors no tenen contacte mecànic amb l'objecte en moviment la posició del qual s'està supervisant.
Els sensors de posició sense contacte garanteixen una alta velocitat i una alta freqüència d'encesa del mecanisme. Un cert desavantatge d'aquests sensors és la dependència, la seva precisió, dels canvis en la tensió d'alimentació i la temperatura. Depenent dels requisits, el dispositiu de sortida d'aquests dispositius pot ser el següent element lògic sense contactei relé elèctric.
En els esquemes de frenada de precisió d'accionaments elèctrics, els sensors de proximitat es poden utilitzar tant per comandar un canvi de velocitat com una parada final.
Actualment hi ha molts tipus de sensors al mercat, però en el marc d'aquest article destacarem el tema dels sensors de posició directament inductius, ja que en més del 80% dels casos són sensors inductius els que serveixen com a sensors per a la posició dels mecanismes.
El sensor inductiu s'activa quan el metall s'acosta a la seva zona d'activació. Per aquest motiu, els sensors de posició inductius també s'anomenen sensors de presència, sensors de proximitat o simplement interruptors inductius.
Considerem ara el principi de funcionament d'un sensor inductiu. Com s'ha esmentat anteriorment, quan el metall està prou a prop de la zona d'activació, el sensor s'activa. Aquest fenomen consisteix en la interacció dels implicats inductors amb metall que s'hi acosta, que canvia bruscament la magnitud del camp magnètic de la bobina, la qual cosa condueix a l'activació del sensor, s'activa, apareix el senyal corresponent a la seva sortida.
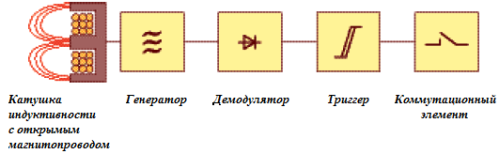
La part electrònica del dispositiu conté un circuit de control, que al seu torn controla un interruptor de relé o transistor. Consta de les parts següents:
-
Un generador que crea un camp electromagnètic necessari per interactuar amb un objecte.
-
Disparador de Schmitt que proporciona histèresi de commutació.
-
Un amplificador per augmentar l'amplitud del senyal perquè assoleixi el valor d'actuació requerit.
-
Indicador LED que informa sobre l'estat de l'interruptor. També proporciona monitorització i configuració del rendiment.
-
Compost per protegir contra la penetració de partícules sòlides i aigua.
-
Carcassa per al muntatge del sensor i protecció de diferents influències mecàniques Està fabricada en llautó o poliamida i està acabada amb fixacions.
Els sensors de posició inductius s'utilitzen àmpliament en sistemes d'automatització industrial on és necessari determinar periòdicament o constantment la posició de qualsevol part del mecanisme. El sensor genera un senyal que s'envia a la unitat. Un arrancador, controlador, relé, convertidor de freqüència, etc. poden actuar com a mecanisme executiu. El més important és que els paràmetres del sensor corresponen als paràmetres de la unitat en termes de tensió i corrent.
La majoria dels sensors no són dispositius d'alimentació, són principalment dispositius de senyalització, per tant, el propi sensor, per regla general, no canvia res potent, sinó que només controla, dóna un senyal de control, actua com un dispositiu d'inici d'acció que ja es pot connectar. a la commutació d'alimentació.
Els sensors de posició inductius moderns es troben més sovint en dues versions de carcassa de plàstic o metall: rectangular o cilíndrica. El diàmetre del sensor amb una secció circular pot ser de 4 a 30 mm, però els diàmetres més utilitzats són 18 i 12 mm.
Quan el sensor es munta a l'equip, s'estableix un espai entre la placa metàl·lica i la zona d'accionament del sensor, normalment aquesta distància no supera el diàmetre del sensor i, per regla general, resulta ser 2-3 vegades més petita que el seu diàmetre.
Segons el mètode de connexió, els sensors de posició inductius poden ser de dos, tres, quatre i cinc fils.
Dos cables canvien directament la càrrega, com ara bobina d'arrencada, és a dir, funcionen com un interruptor convencional. Els sensors de dos cables requereixen resistència a la càrrega, de manera que no sempre són adequats com a eina fiable, però no perden la seva rellevància.
La càrrega simplement es connecta en sèrie amb el sensor, si s'utilitza una tensió constant, és important observar la polaritat, si la polaritat alterna no és important, el més important és la potència i el corrent commutats.
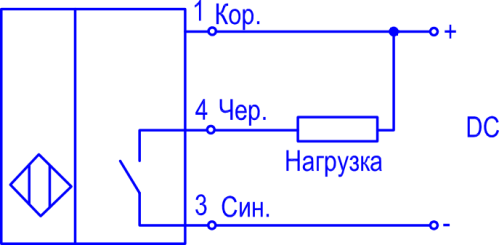
Els sensors de tres fils tenen un tercer cable per alimentar el sensor en si, i aquesta és la solució més popular. Els sensors de quatre i cinc fils tenen sortides de transistors o relés per connectar la càrrega, i el cinquè cable us permet seleccionar el mode de funcionament del sensor, l'estat inicial de les sortides.
Com que les sortides poden ser tant de relé com de transistor, els sensors es divideixen en tres tipus segons el dispositiu de les sortides: relé, npn i pnp.
Sensors amb sortida a relé
Un sensor amb sortida de relé té un aïllament galvànic del circuit d'alimentació del circuit inclòs. Commuta un cable i la tensió del circuit commutat no és especialment crítica. Com que el circuit d'alimentació del sensor està aïllat galvànicament, això es pot considerar un avantatge del sensor de relé. Els sensors d'aquest tipus solen ser grans.
Sensors amb sortida de transistor pnp
El sensor té un transistor pnp a la sortida que commuta el cable positiu amb la càrrega. Una càrrega està connectada al circuit col·lector del transistor pnp de sortida, que està permanentment connectat al negatiu a través del seu segon cable.
Sensors amb sortida de transistor npn
El sensor té un transistor NPN a la sortida que commuta el cable negatiu amb la càrrega. Una càrrega està connectada al circuit col·lector del transistor de sortida npn, que està connectat permanentment pel seu segon cable al cable positiu.
Segons l'estat inicial de les sortides, els sensors de posició inductius poden ser contactes normalment tancats o normalment oberts. L'estat inicial significa que aquest estat es troba en el moment en què el sensor encara no està activat, és a dir, no està activat.
Si els contactes de sortida estan tancats normalment, aleshores la càrrega es connecta al temps d'inactivitat, si està normalment oberta, fins que s'activa el sensor, la càrrega es tallarà i no es subministrarà energia a la unitat (per exemple, el contactor). Els contactes normalment tancats es designen en format anglès — N.C. (Normalment tancat), Normalment obert — N.A. (Normalment obert).
Així, els sensors amb sortides de transistors són de quatre tipus: dos tipus segons la conductivitat (pnp o npn) i dos tipus segons l'estat inicial de les sortides. També pot haver-hi un retard en encendre o apagar.

Depenent del tipus d'accionament connectat al sensor, així com del mètode d'alimentació, la lògica del sensor pot ser positiva o negativa. Això es deu al nivell de tensió que activa l'entrada del dispositiu.
Si l'entrada s'activa quan el cable negatiu de l'actuador està connectat a terra, al menys, la lògica s'anomena negativa, aquesta connexió és característica dels sensors amb sortides de transistor de tipus npn.
La lògica positiva correspon a connectar el cable positiu de la unitat a la font d'alimentació positiva quan s'activa, aquesta lògica és típica dels sensors amb sortides de transistor pnp. Molt sovint, hi ha una lògica positiva en el funcionament dels sensors inductius per a la posició dels mecanismes.
Els tipus més antics de sensors de posició inductius utilitzats
Sensors de posició inductius IKV-22
Sensors inductius IKV-22. El funcionament d'aquests sensors es basa en el principi de canviar la resistència inductiva de les bobines amb un nucli d'acer quan l'espai d'aire al circuit magnètic canvia.
Un circuit magnètic amb dues bobines està muntat sobre una placa d'acer, tancada amb una coberta de plàstic. Dos condensadors MBGP (un amb una capacitat de 15 μF, 200 V, l'altre amb una capacitat de 10 μF, 400 V) estan connectats a la placa des de la part inferior. Els condensadors estan coberts amb una coberta. El cable es connecta a través del segell. Al mecanisme s'instal·la una derivació magnètica, les dimensions de la qual han de ser almenys: 2 mm de gruix, 80 mm d'amplada, 140 mm de longitud. L'entrefer entre el circuit magnètic i la derivació és de 6 ± 4 mm.
El relé de sortida normalment s'encén i s'apaga en el moment en què la derivació magnètica passa pel sensor, quan a causa d'un canvi en la resistència inductiva de la bobina, es produeix una ressonància de corrent i el corrent a través de la bobina del relé cau. Aquests relés: tipus MKU-48, 12 V AC, corrent no superior a 0,45 A, corrent de caiguda no inferior a 0,1 A.La tensió d'alimentació del circuit del sensor és de relé de 24 V AC.
Sensors de posició inductius ID-5
Als tallers metal·lúrgics s'utilitzen sensors inductius del tipus ID-5, dissenyats per treballar a temperatures ambient de fins a + 80 ° C i humitat fins al 100%. La pols i l'escala conductores són acceptables. Amb el sensor s'utilitza un amplificador de sortida semiconductor tipus UID-10. La potència de sortida de l'amplificador (25 W) és suficient per encendre els relés REV-800, els contactors KP21, MK-1, etc.
L'espai d'aire entre el sensor i l'objecte ferromagnètic observat pot ser de fins a 30 mm. Les dimensions del sensor ID-5 són 187x170x70 mm, la tensió d'alimentació és de 220 V ± 15%, 50 Hz.
Interruptors sense contacte BSP de mida petita
A les màquines de tall de metall s'utilitzen petits interruptors de moviment BSP-2 (amb sortida sense contacte, a element lògic) i BRP (amb sortida a relé PE-21, 24 V, 16 Ohm).
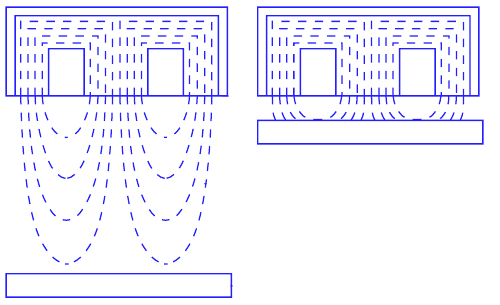
L'interruptor BSP-2 consta d'un sensor de transformador diferencial i un disparador de semiconductors. El sistema magnètic de la primera bobina del sensor es mou per una placa d'acer, i la segona bobina es manipula mentre es mou sobre el seu sistema magnètic connectat al mecanisme d'armadura plana. Les bobines s'encenen en sentit contrari.
Si l'induït està per sobre del sensor, les reactàncies inductives de les bobines són iguals i la sortida del sensor del transformador diferencial és zero. En aquest cas, apareix una tensió d'almenys 2,5 V a la sortida del disparador, que és suficient perquè l'element lògic funcioni.
En absència d'una armadura per sobre del sensor, s'aplica una tensió al disparador, que el retorna al seu estat original. Aleshores, el senyal de sortida de l'interruptor és zero.
El principi de funcionament de l'interruptor BRP és en molts aspectes similar al del BSP-2.Un sensor inductiu (segons el circuit del transformador diferencial), un disparador i un amplificador s'instal·len dins de la caixa. Les bobines secundàries amb un nombre diferent de voltes s'encenen en sentit contrari. A mesura que l'induït se solapa amb el sistema magnètic del sensor, el senyal disminueix i després de canviar la fase, el disparador s'activa i s'activa un relé de sortida extern (PE-21, 24 V, 16 Ohm).
L'ancoratge fixat al mecanisme té unes dimensions de 80x15x3 mm. L'espai entre l'ancoratge i el sensor és de 4 mm. La precisió dels interruptors en el mode nominal és de ± 0,5 mm, el diferencial d'accionament no és superior a 5 mm. A les. fluctuacions en la tensió i la temperatura d'alimentació, l'error dels interruptors BSP-2 i BRP pot arribar a ± (2,5-f-3,0) mm.
Sensors inductius d'alta freqüència VKB
També s'utilitzen sensors inductius d'alta precisió del tipus VKB amb una armadura plana o en forma d'U per a l'automatització de màquines de tall de metall. Els pols del transformador integrat formen un sistema electromagnètic obert. L'espai d'aire de treball és de 0,1-0,15 mm.
La tensió de sortida del bobinatge secundari del transformador s'alimenta a un circuit de mesura diferencial i després a un amplificador de transistors. L'error total del sensor amb fluctuacions de temperatura de 5 a 40 ° C i tensió del 85 al 110% del valor nominal és de ± (0,064-0,15) mm, la diferència de resposta no supera els 0,4 mm. La velocitat màxima de moviment del mecanisme és de 10 m / mm. Mides del sensor 62x34x24 mm. Tensió d'alimentació 12 V.
Els tipus especials de sensors inductius de precisió per a màquines de tall de metall amb un circuit diferencial tenen un error inferior a ± 0,01 mm.Aquests sensors inclouen un interruptor de moviment sense contacte del tipus VPB12, que consisteix en una unitat de sensor en una unitat electrònica. La unitat de sensor inclou un sensor de treball inductiu, un sensor de compensació inductiu i plaques de circuit imprès. El mecanisme està muntat: element de ferrita de control. Tensió d'alimentació 12 V DC. La distància d'exposició màxima no és superior a 0,12 mm. Es pot connectar un relé tipus RPU-0 a la sortida del sensor. El corrent de càrrega màxima del dispositiu de sortida és de 0,16 A.
Sensors de posició del generador
Els sensors d'aquest tipus són compactes i molt precisos. Els generadors de sensors de les sèries KVD-6M i KVD-25 (amb ranures), KVP-8 i KVP-16 (avions) s'han demostrat bé. Són adequats per al seu ús en altes concentracions d'humitat i pols. Els elements del circuit de transistors del sensor (generador i disparador) es troben en una carcassa de poliestirè resistent als cops. El segellat es realitza amb un compost d'enduriment en fred. El rang de temperatura de funcionament és de -30 a +50 ° C.
El sensor HPC genera un senyal discret quan una placa metàl·lica («bandera») passa per la ranura, provocant una avaria en la generació i la commutació del disparador. L'amplada de la ranura és de 6 mm per al sensor KVD-6M i de 25 mm per al sensor KVD-25.
Els sensors KVP-8 i KVP-16 s'activen quan hi passa una placa metàl·lica a una distància màxima de 8 i 16 mm, respectivament.