Sistemes de control automàtic tancats
 Els sistemes de control automàtic tancats (ACS) es diferencien dels circuits oberts en l'equip utilitzat i en la totalitat de l'automatització. Amb l'ACS obert, la unitat principal (inclòs l'equip de control) no rep informació sobre el mode de funcionament real de la instal·lació elèctrica (motor de conducció, màquina en marxa).
Els sistemes de control automàtic tancats (ACS) es diferencien dels circuits oberts en l'equip utilitzat i en la totalitat de l'automatització. Amb l'ACS obert, la unitat principal (inclòs l'equip de control) no rep informació sobre el mode de funcionament real de la instal·lació elèctrica (motor de conducció, màquina en marxa).
En un ASUB tancat, la informació es transmet als elements de control, que s'acompanya de l'enviament dels senyals de comandament adequats. El circuit que transmet aquesta informació tanca el bucle de control, formant un ACS tancat o ACS de retroalimentació.
La diferència entre ACS tancat i obert es pot explicar amb l'exemple de controlar la velocitat d'un motor elèctric en un sistema generador-motor (G-D). Amb l'ACS obert (Fig. 1, a), la velocitat establerta del motor elèctric s'ajusta manualment mitjançant el potenciòmetre P. L'ajust de la velocitat es realitza visualment mitjançant un tacòmetre, que s'alimenta amb el tacògenerador TG. Qualsevol desviació de la velocitat del punt de consigna és eliminada per l'operador actuant sobre el control lliscant del potenciòmetre.
En un ACS tancat (Fig.1, b) l'induït del tacogenerador TG s'inclou al circuit d'excitació del generador OVG, creant un sistema tancat o de retroalimentació (en aquest cas amb retroalimentació de velocitat).
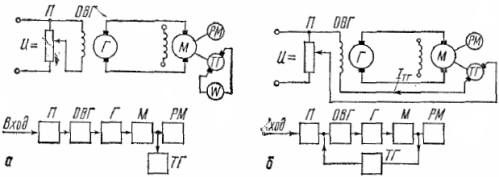
Arròs. 1. Circuit de control del motor elèctric en el sistema G -M: a — ACS obert, b — ACS tancat
El corrent generat pel tacogenerador (Aztg) en un circuit tancat dirigit al corrent del potenciòmetre (Azn) i el corrent resultant actua en el circuit igual a la diferència geomètrica d'aquests corrents. Utilitzant el control lliscant del potenciòmetre, l'operador estableix el valor del corrent resultant a la bobina d'excitació de l'OVG, a la qual es proporciona la velocitat corresponent del motor elèctric. Aquí és on acaba el paper de l'operador. En el futur, el sistema manté automàticament el mode de funcionament establert de l'accionament elèctric amb una certa precisió.
Suposem que com a resultat de la pujada de càrrega, la velocitat del motor elèctric ha disminuït en comparació amb l'especificada. La reducció de la velocitat va acompanyada d'una reducció corresponent de la velocitat del tacogenerador i de la tensió als seus terminals. Això, al seu torn, provocarà una disminució del corrent Aztg al circuit de retroalimentació i, en una determinada posició del control lliscant del potenciòmetre, un augment del corrent resultant en el bobinat d'excitació del generador. La tensió del generador i la velocitat del motor augmentaran en conseqüència.
El procés d'augment de la velocitat i la tensió continuarà fins que el corrent del bucle de retroalimentació assoleixi el valor establert i la velocitat del motor arribi al valor establert.
En l'anàlisi dels sistemes de control automàtic, gràfics de funcions… A la fig.Esquema funcional de 2 transmissions d'ACS, que inclou els elements següents:
1 - dispositiu principal que estableix el mode de funcionament, dóna una ordre, un pols d'inici o un senyal,
2 — element de comparació. Inclou el senyal X1 del mestre, el senyal X0, que determina la velocitat o el nivell del valor controlat. Tenint en compte el senyal del novè element de retroalimentació principal, l'element 2 compara els senyals rebuts i envia el senyal corregit addicionalment X2,
3 — l'element transformador, el senyal op el transforma en una altra forma, més convenient per a una posterior transmissió. Per exemple, el senyal X2 es subministra en forma de pressió hidràulica (pneumàtica, mecànica) L'element 3 el converteix en corrent elèctric. Com que aquest tipus de transformació pot requerir energia addicional, l'element 3 està connectat a una font d'energia PE,
4 — afegint element, rep dos senyals: X3 i X8 de l'element de correcció (element de memòria) 8. Aquests senyals es sumen per l'element 4 i s'envien al següent element,
5 — element amplificador, el senyal d'entrada X1 pot ser feble i s'ha d'amplificar per a la transmissió posterior. Això es fa mitjançant l'element 5 que està connectat a la font d'alimentació PE,
6 - element executiu, executa el senyal rebut (motor elèctric, relé electromagnètic, servomotor),
7 — objecte ajustable o màquina de treball.
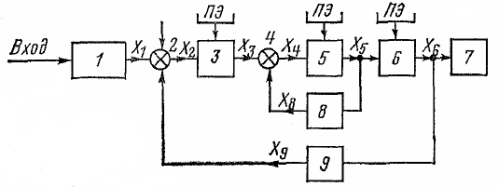
Arròs. 2. Esquema funcional de l'ACS
Cada element d'automatització és un convertidor d'energia, a l'entrada del qual s'aplica el valor X' i el valor X s'elimina de la sortida. «Per a cada element en estat estacionari hi ha una certa dependència X» (X'), anomenada característica estàtica.
Un sistema de control automàtic tancat es caracteritza per la presència de retroalimentació; té almenys un bucle de retroalimentació que connecta la sortida del sistema a la seva entrada. A més, pot haver-hi l'anomenada retroalimentació interna, connectant la sortida i l'entrada d'elements ACS individuals.
Els comentaris es divideixen en durs i flexibles. Les restriccions dures operen tant en els modes de funcionament transitori com estacionari del sistema, flexibles, només en els transitoris. Diferenciar entre feedback positiu i negatiu. A mesura que augmenta el valor regulat, la connexió positiva l'augmenta encara més, i la negativa, per contra, disminueix. Els feedbacks poden transmetre senyals proporcionals a l'angle de gir, velocitat, tensió, corrent, etc. i s'anomenen retroalimentació d'angle, velocitat, voltatge i corrent en conseqüència. Per a més detalls consulteu aquí: Elements dels sistemes d'automatització
Segons el principi de funcionament, ACS es pot dividir en tres grups:
-
funcionament continu en el qual la relació entre els valors controlats i establerts no es trenca,
-
acció d'impuls, en la qual la connexió entre els valors controlats i establerts té lloc a intervals regulars,
-
acció de relé on la comunicació només es produeix quan un valor arriba a un valor determinat.
Depenent de la llei segons la qual canvia un determinat valor al llarg del temps, l'ACS també es pot dividir en tres grups:
-
sistemes de consigna constant o baix en els quals el valor controlat automàticament es manté constant. Es tracta de sistemes d'estabilització, que són essencialment sistemes de control automàtic (ACS),
-
sistemes en què el valor objectiu es modifica segons un programa específic i predeterminat. És un sistema de gestió de programari,
-
sistemes en què un valor determinat pot variar àmpliament i segons una llei arbitrària, és a dir. sistemes de seguiment.