Formes estructurals de motors asíncrons
 Formes estructurals externes motors asíncrons estan determinats per la forma en què està muntat el motor i la forma de la seva protecció de la influència del medi ambient. El rendiment motor normal de les cames està molt estès (fig. 1, a). En aquest cas, l'eix del motor ha de ser horitzontal. Els motors amb brides (Fig. 1, b) s'utilitzen àmpliament per a instal·lacions horitzontals i verticals.
Formes estructurals externes motors asíncrons estan determinats per la forma en què està muntat el motor i la forma de la seva protecció de la influència del medi ambient. El rendiment motor normal de les cames està molt estès (fig. 1, a). En aquest cas, l'eix del motor ha de ser horitzontal. Els motors amb brides (Fig. 1, b) s'utilitzen àmpliament per a instal·lacions horitzontals i verticals.
També produeixen motors d'inducció en línia que no tenen bastidor, escuts finals, eix. Els elements d'aquest motor estan incrustats a les parts del cos de la màquina, i l'eix del motor és un dels eixos de la màquina (sovint l'eix) i el llit és el cos del conjunt de la màquina, per exemple, un capçal de mòlta (Fig. . 2).
Els motors de disseny especial estan àmpliament distribuïts a l'estranger, inclosos els motors amb petites dimensions radials i una longitud considerable, i els motors de disc, especialment amb un estator en forma de cilindre i un rotor exterior en forma d'anell. També s'utilitzen motors, quan s'encenen, el rotor, que té forma de con, es mou en direcció axial, desenvolupant una força d'empenta important.
Aquesta força s'utilitza per alliberar el fre mecànic que actua sobre l'eix del motor després de desconnectar el motor de la xarxa elèctrica. A més, s'utilitzen nombrosos dissenys de motor amb caixes de canvis, caixes de canvis i variadors mecànics connectats que proporcionen una regulació suau.
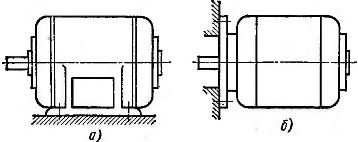
Arròs. 1. Disseny de motors asíncrons
El desavantatge d'utilitzar motors amb formes de disseny especials és la dificultat de substituir-los en cas d'accident. Un motor elèctric defectuós no s'ha de substituir, sinó reparar-se i la màquina es va quedar al ralentí durant la reparació.
Per conduir les màquines s'utilitzen motors amb diverses formes de protecció del medi ambient.
Els motors blindats tenen reixes que cobreixen les reixetes dels escuts finals. Això evita que entrin objectes estranys al motor i també s'evita que el treballador toqui les parts rotatives i actives. Per evitar que caiguin gotes de líquid des de dalt, els motors estan equipats amb ventilacions cap avall o verticals.
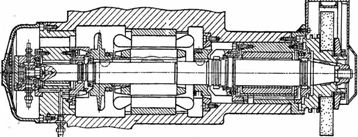
Arròs. 2. Motor de rectificat incorporat
Tanmateix, quan aquest motor elèctric funciona en un taller, el seu ventilador, juntament amb l'aire, aspira pols, ruixa refrigerant o oli, així com petites partícules d'acer o ferro colat, que, adherint-se a l'aïllament del bobinatge i vibrant. sota la influència d'un camp magnètic altern, es desgasta ràpidament l'aïllament.
Els motors tancats, les pantalles finals dels quals no tenen orificis de ventilació, tenen una protecció més fiable contra les influències ambientals. Aquests motors, amb les mateixes dimensions que els protegits, a causa d'una refrigeració més pobre, tenen menys potència.Amb les mateixes potències i velocitats, el motor elèctric tancat és 1,5-2 vegades més pesat que el protegit i, en conseqüència, el seu preu és més elevat.
El desig de reduir la mida i el cost dels motors tancats va portar a la creació de motors elèctrics tancats. Aquest motor elèctric té un ventilador extern muntat a l'extrem de l'eix del motor oposat a l'extrem d'accionament i cobert amb una tapa. Aquest ventilador bufa al voltant de la carcassa del motor.
Els motors de ventilador són significativament més lleugers i econòmics que els tancats. Els motors bufats s'utilitzen més sovint per conduir màquines de tall de metall. Els motors amb altres formes de protecció del medi ambient s'utilitzen relativament poques vegades per conduir màquines de tall de metall. En particular, de vegades s'utilitzen motors elèctrics tancats per conduir màquines de rectificat.
Els motors elèctrics estan dissenyats per a tensions estàndard de 127, 220 i 380 V. El mateix motor es pot connectar a xarxes amb diferents tensions, per exemple, a xarxes amb tensions de 127 i 220 V, 220 i 380 V. amb dues tensions, la El bobinatge de l'estator del motor elèctric està connectat en un triangle, per a un de més gran, en una estrella. El corrent en els bobinats del motor elèctric i la tensió en ells seran els mateixos en ambdós casos amb aquesta inclusió. A més, produeixen motors elèctrics de 500 V, els seus estators estan connectats permanentment en una estrella.
Els motors asíncrons de gàbia d'esquirol utilitzats en moltes indústries es produeixen amb una potència nominal de 0,6-100 kW per velocitats sincròniques 600, 750, 1000, 1500 i 3000 rpm.
La secció transversal dels cables del bobinatge del motor elèctric depèn de la magnitud del corrent que hi circula. Amb un corrent més gran, el bobinatge del motor tindrà un volum més gran.La secció transversal del circuit magnètic és proporcional a la magnitud del flux magnètic. D'aquesta manera, les dimensions del motor elèctric es determinen pels valors calculats de corrent i flux magnètic o el parell nominal del motor elèctric. Potència nominal del motor

on P.n — potència nominal, kW, Mn- moment nominal, N • m, nn- velocitat nominal, rpm.
La potència nominal per a la mateixa mida del motor augmenta a mesura que augmenta la seva velocitat nominal. Per tant, els motors elèctrics de baixa velocitat són més grans que els motors d'alta velocitat de la mateixa potència.
Quan es rectifica de forats petits, es requereixen velocitats de l'eix de rectificat molt altes per obtenir velocitats de tall adequades. Per tant, quan es rectifica amb una mola amb un diàmetre de 3 mm a una velocitat de només 30 m / s, la velocitat de l'eix hauria de ser igual a 200.000 revolucions per minut. A altes velocitats del cargol, la força de tancament es pot reduir dràsticament. Al mateix temps, es redueix la mòlta de les rodes i la flexió del mandril i s'augmenta l'acabat superficial i la precisió de mecanitzat.
En relació amb l'anterior, la indústria utilitza nombrosos models de l'anomenat. Caps elèctrics amb velocitats de rotació de 12.000-144.000 rpm i superiors. L'electroeix (Fig. 3, a) és un eix de rectificat sobre coixinets de rodament amb un motor de gàbia d'esquirol d'alta freqüència incorporat. El rotor del motor es troba entre dos coixinets a l'extrem de l'eix oposat a la mola.
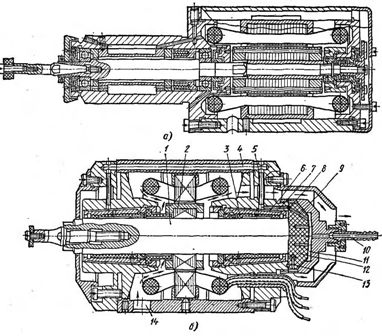
Arròs. 3. Electrofusos
L'estator de l'eix elèctric està muntat amb xapa d'acer elèctric. S'hi col·loca una bobina bipolar.El rotor del motor a velocitats de fins a 30.000-50.000 rpm també està marcat amb xapa i es subministra amb un bobinat de curtcircuit convencional. Tendeixen a reduir el diàmetre del rotor tant com sigui possible.
L'elecció del tipus de coixinet és de particular importància per al funcionament dels electroeixos. S'utilitzen habitualment coixinets de boles de precisió, que funcionen amb una precàrrega creada mitjançant molles calibrades. Aquests coixinets s'utilitzen per a velocitats de rotació que no superen les 100.000 revolucions per minut.
Els coixinets aerostàtics s'utilitzen àmpliament a la indústria (Fig. 3, b). L'eix 1 del motor elèctric d'alta freqüència gira en coixinets lubricats per aire 3. La càrrega axial és absorbida pel coixí d'aire entre l'extrem de l'eix i el coixinet de suport 12, contra el qual es pressiona l'eix sota la pressió de l'aire subministrat a l'interior de la carcassa a través del forat 14 per refredar el motor. l'aire comprimit passa pel filtre i entra per l'accessori 10 de la cambra 11. Des d'aquí, pel canal 9 i la ranura circular 8, l'aire passa al canal 7 i la cambra 6. Des d'aquí, l'aire entra al coixinet. escletxa. L'aire es subministra al coixinet esquerre a través dels tubs 5 i els canals 4 de la carcassa del motor.
L'aire d'escapament es descarrega pels canals 13. El coixí d'aire a l'espai del coixinet de suport es crea per l'aire que passa des de la cambra 11 a través del coixinet fet de grafit de carboni porós. Cada coixinet té llautó cònic. S'hi pressiona un revestiment de grafit de carboni, els porus del qual estan plens de bronze. Abans de posar en marxa l'electroeix, es subministra aire i es formen coixins d'aire entre el cargol i els casquilles. Això elimina la fricció i el desgast dels coixinets durant la posada en marxa.Després d'això, el motor s'encén, la velocitat del rotor 2 assoleix la velocitat nominal en 5-10 s. Quan el motor s'apaga, el rotor 2 va per inercia durant 3-4 minuts. Per reduir aquest temps, s'utilitza un fre elèctric.
L'ús de bosses d'aire redueix dràsticament les pèrdues per fricció en el cargol elèctric, el consum d'aire és de 6-25 m3/h.
També s'han utilitzat electroeixos sobre coixinets amb lubricació líquida. El seu funcionament requereix una circulació contínua d'oli a alta pressió, en cas contrari, l'escalfament dels coixinets es torna inacceptable.
La producció de motors elèctrics d'alta freqüència requereix una fabricació de precisió de peces individuals, un equilibri dinàmic del rotor, un muntatge precís i una estricta uniformitat de la bretxa entre l'estator i el rotor. La freqüència del corrent que subministra el motor elèctric d'alta freqüència es selecciona en funció de la velocitat requerida del motor elèctric:

on nSi la freqüència de gir síncrona del motor elèctric, rpm, f és la freqüència del corrent, Hz, p és el nombre de pols, ja que p = 1, aleshores

A velocitats de rotació síncrona dels eixos elèctrics de 12.000 i 120.000 rpm, la freqüència actual hauria de ser igual a 200 i 2000 Hz, respectivament.
S'utilitzen generadors especials per alimentar motors d'alta freqüència. A la fig. La figura 4 mostra un generador d'inducció síncron trifàsic. L'estator del generador té ranures amples i estretes. La bobina de camp, que es troba a les ranures amples de l'estator, s'alimenta amb corrent continu. El camp magnètic dels conductors d'aquesta bobina es tanca a través de les dents de l'estator i les protuberàncies del rotor tal com es mostra a la fig. 4 amb línia de punts.
Quan el rotor gira, el camp magnètic que es mou al llarg de les protuberàncies del rotor travessa les espires del bobinatge de corrent altern situat a les ranures estretes de l'estator i indueix una e alterna. etc. c) La freqüència d'aquest e. etc. v. depèn de la velocitat i del nombre d'orelles del rotor. Les forces electromotrius induïdes pel mateix flux en els bobinats de camp s'anul·len mútuament a causa de l'activació imminent de les bobines. Les bobines de camp són alimentades per un rectificador connectat a la xarxa. L'estator i el rotor tenen nuclis magnètics fets de xapa d'acer elèctric.
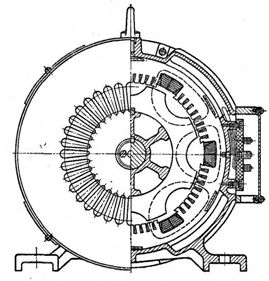
Arròs. 4. Generador d'inducció d'alta freqüència
Els generadors amb el disseny descrit es produeixen per a potències nominals d'1 a 3 kW i freqüències de 300 a 2400 Hz. Els generadors són accionats per motors asíncrons amb una velocitat síncrona de 3000 rpm.
Els generadors d'inducció amb freqüència augmentada comencen a ser substituïts per convertidors de semiconductors (tiristors). En aquest cas, solen oferir la possibilitat de canviar la freqüència del corrent i, per tant, la capacitat d'ajustar la velocitat de gir del motor elèctric. Si durant aquesta regulació la tensió es manté constant, es realitza una regulació de potència constant. Si la relació entre la tensió i la freqüència del corrent (i, per tant, el flux magnètic del motor) es manté constant, la regulació es porta a terme amb una constant a totes les velocitats durant molt de temps el parell admissible.
Els avantatges dels accionaments amb un convertidor de freqüència de tiristor i un motor asíncron de gàbia d'esquirol són l'alta eficiència i la facilitat d'ús. L'inconvenient segueix sent el preu elevat.En enginyeria mecànica, el més recomanable és utilitzar aquest accionament per a motors d'alta freqüència. Al nostre país s'han creat unitats experimentals d'aquest tipus.
Els motors asíncrons bifàsics de baixa potència s'utilitzen sovint en accionaments executius de màquines-eina. L'estator d'aquest motor té dos bobinatges: el bobinat de camp 1 i el bobinat de control 2 (Fig. 5, a). El rotor 4 en una gàbia d'esquirol té una gran resistència activa. Els eixos de les bobines són perpendiculars entre si.
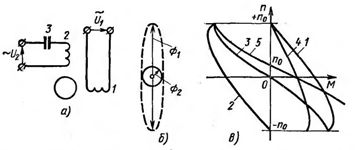
Arròs. 5. Esquema d'un motor d'inducció bifàsic i les seves característiques
Els voltatges Ul i U2 s'apliquen als bobinats. Quan el condensador 3 està connectat al circuit de la bobina 2, el corrent en ell supera el corrent de la bobina 1. En aquest cas, es forma un camp magnètic el·líptic giratori i el rotor 4 de l'esquirol comença a girar. Si reduïu la tensió U2, el corrent de la bobina 2 també disminuirà. Això comportarà un canvi en la forma de l'el·lipse del camp magnètic giratori, que es fa cada cop més allargat (Fig. 5, b).
Un motor de camp el·líptic es pot considerar com dos motors en un eix, un que funciona amb un camp pulsatori F1 i l'altre amb un camp circular F2. El motor de camp polsador F1 es pot considerar com dos motors d'inducció de camp circular idèntics cablejats per girar en direccions oposades.
A la fig. 5, c mostra les característiques mecàniques 1 i 2 d'un motor d'inducció amb un camp giratori circular i una resistència activa important del rotor quan gira en diferents direccions. La característica mecànica 3 d'un motor monofàsic es pot construir restant els moments M de les característiques 1 i 2 per a cada valor de n.A qualsevol valor de n, el parell d'un motor monofàsic amb una alta resistència del rotor s'atura. La característica mecànica del motor de camp circular està representada per la corba 4.
La característica mecànica 5 d'un motor bifàsic es pot construir restant els moments M de les característiques 3 i 4 a qualsevol valor de n. El valor de n0 és la velocitat de rotació d'un motor d'inducció bifàsic a una velocitat de ralentí ideal. Ajustant el corrent d'alimentació de la bobina 2 (Fig. 5, a), és possible canviar el pendent de la característica 4 (Fig. 5, c), i per tant el valor de n0. D'aquesta manera, es realitza el control de velocitat d'un motor d'inducció bifàsic.
Quan es treballa amb valors de lliscament elevats, les pèrdues al rotor esdevenen força importants. Per aquest motiu, la regulació considerada només s'utilitza per a accionaments auxiliars de baixa potència. Per reduir el temps d'acceleració i desacceleració, s'utilitzen motors d'inducció bifàsics amb un rotor buit. En aquest motor, el rotor és un cilindre buit d'alumini de parets primes.