Regulació de freqüència d'un motor asíncron
Actualment, el control de freqüència de la velocitat angular de gir d'un accionament elèctric amb un motor asíncron s'utilitza àmpliament, ja que permet en un ampli rang canviar sense problemes la velocitat de gir del rotor tant per sobre com per sota del valor nominal.
Els convertidors de freqüència són dispositius moderns d'alta tecnologia amb un ampli rang d'ajust que tenen un ampli conjunt de funcions per controlar motors asíncrons. La màxima qualitat i fiabilitat permeten utilitzar-los en diverses indústries per controlar accionaments de bombes, ventiladors, transportadors, etc.

Els convertidors de freqüència per a la tensió d'alimentació es divideixen en monofàsics i trifàsics, però per disseny, en màquines elèctriques giratòries i estàtiques. En els convertidors de màquines elèctriques, la freqüència variable s'obté utilitzant màquines elèctriques convencionals o especials. V convertidors de freqüència estàtics el canvi en la freqüència del corrent d'alimentació s'aconsegueix mitjançant l'ús d'elements elèctrics que no tenen moviment.
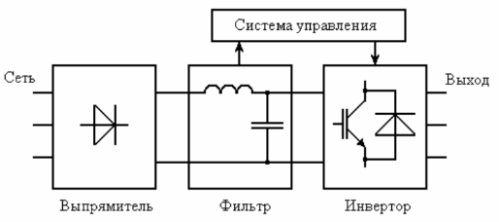
Circuit convertidor de freqüència d'un motor d'inducció
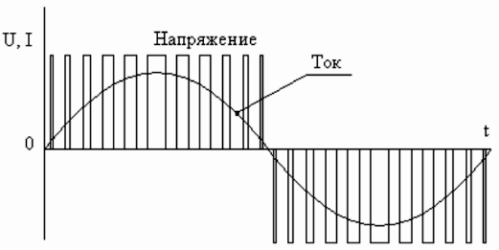
Senyal de sortida del convertidor de freqüència
Els convertidors de freqüència per a xarxa monofàsica poden proporcionar accionament elèctric per a equips de producció amb una potència de fins a 7,5 kW. Una característica del disseny dels convertidors monofàsics moderns és que a l'entrada hi ha una fase amb una tensió de 220 V, i a la sortida hi ha tres fases amb el mateix valor de tensió, que permet connectar motors elèctrics trifàsics a un dispositiu sense utilitzar condensadors.
Els convertidors de freqüència alimentats per una xarxa trifàsica de 380 V estan disponibles en el rang de potència de 0,75 a 630 kW. Depenent del valor de potència, els dispositius es produeixen en caixes combinades de polímers i metàl·liques.
L'estratègia de control més popular per als motors d'inducció és el control vectorial. Actualment, la majoria dels convertidors de freqüència implementen control vectorial o fins i tot control vectorial sense sensor (aquesta tendència es troba en convertidors de freqüència que originalment implementen control escalar i no tenen terminals per connectar un sensor de velocitat).
Segons el tipus de càrrega de sortida, els convertidors de freqüència es subdivideixen segons el tipus d'implementació:
-
per a accionaments de bombes i ventiladors;
-
per a la propulsió elèctrica industrial general;
-
funciona com a part de motors elèctrics que funcionen amb sobrecàrrega.

Característiques mecàniques de càrregues típiques
Els convertidors de freqüència moderns tenen un conjunt divers de característiques funcionals, per exemple, tenen control manual i automàtic de la velocitat i sentit de gir del motor, així com potenciòmetre incorporat al panell de control.Dotat amb la capacitat d'ajustar el rang de freqüència de sortida de 0 a 800 Hz.
Els convertidors són capaços de controlar automàticament un motor asíncron segons els senyals dels sensors perifèrics i conduir un accionament elèctric segons un algorisme de temporització determinat. Admet les funcions de recuperació automàtica en cas de fallada de corrent a curt termini. Realitzeu un control transitori des d'una consola remota i protegiu els motors elèctrics de la sobrecàrrega.

La relació entre la velocitat angular de gir i la freqüència del corrent d'alimentació es desprèn de l'eq
ωo = 2πe1/ p
Amb una tensió d'alimentació constant U1 i un canvi de freqüència, el flux magnètic del motor d'inducció canvia. Al mateix temps, per a un millor ús del sistema magnètic, amb una disminució de la freqüència d'alimentació, cal reduir la tensió proporcionalment, en cas contrari, el corrent de magnetització i les pèrdues a l'acer augmentaran significativament.
De la mateixa manera, a mesura que augmenta la freqüència de subministrament, la tensió ha d'augmentar proporcionalment per mantenir constant el flux magnètic, perquè en cas contrari (amb un parell d'eix constant) això farà que augmenti el corrent del rotor, sobrecarregant els seus bobinatges pel corrent i reduint el parell màxim.
La llei de regulació racional de la tensió depèn de la naturalesa del moment de resistència.
En un moment constant de càrrega estàtica (Ms = const), la tensió s'ha de regular en proporció a la seva freqüència U1 / f1 = const. Per a la naturalesa de la càrrega del ventilador, la relació pren la forma U1 / f21 = const.
Amb parell de càrrega inversament proporcional a la velocitat U1 /√f1 = const.
Les figures següents mostren un esquema de connexió simplificat i les característiques mecàniques d'un motor d'inducció amb control de freqüència de velocitat angular.
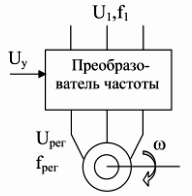
Esquema de connexió d'un convertidor de freqüència a un motor asíncron
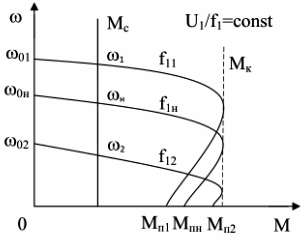
Característiques per a una càrrega amb un moment de resistència estàtic constant
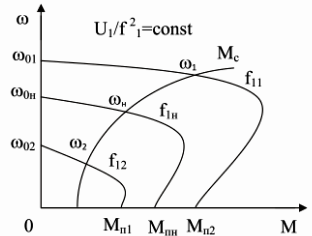
NSFeatures per carregar el ventilador
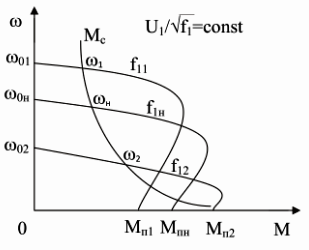
Característiques sota parell de càrrega estàtica inversament proporcional a la velocitat angular de gir
La regulació de la freqüència de la velocitat d'un motor asíncron us permet canviar la velocitat angular de gir en el rang — 20 ... 30 a 1. La regulació de la velocitat d'un motor asíncron des del principal es duu a terme pràcticament fins a zero.
Quan la freqüència de la xarxa de subministrament canvia, el límit superior de la velocitat de rotació d'un motor asíncron depèn de les seves propietats mecàniques, sobretot perquè a freqüències superiors al motor asíncron nominal funciona amb millors característiques energètiques que a freqüències més baixes. Per tant, si s'utilitza una caixa de canvis al sistema d'accionament, aquest control de freqüència del motor s'ha de dur a terme no només cap avall, sinó també cap amunt des del punt nominal, fins a la velocitat màxima de gir permesa en les condicions de la resistència mecànica de el rotor.
Quan la velocitat del motor augmenta per sobre del valor indicat al seu passaport, la freqüència de la font d'alimentació no ha de superar la nominal en no més d'1,5 a 2 vegades.
El mètode de freqüència és el més prometedor per a la regulació d'un motor d'inducció de rotor de gàbia d'esquirol. Les pèrdues de potència amb aquesta regulació són petites, ja que no van acompanyades d'un augment relliscant… Les característiques mecàniques resultants són molt rígides.