El principi de funcionament del convertidor de freqüència i els criteris per a la seva selecció per a l'usuari
 Una breu descripció de la finalitat, principi de funcionament i criteris per seleccionar un convertidor de freqüència com a dispositiu de control d'un motor elèctric asíncron.
Una breu descripció de la finalitat, principi de funcionament i criteris per seleccionar un convertidor de freqüència com a dispositiu de control d'un motor elèctric asíncron.
Motor d'inducció de gàbia d'esquirol avui és el dispositiu més massiu i fiable per controlar diverses màquines i mecanismes. Però cada medalla té un altre costat.
Els dos principals desavantatges del motor d'inducció són la impossibilitat de simple control de velocitat del rotor, corrent d'arrencada molt gran: cinc, set vegades el nominal. Si només s'utilitzen dispositius de control mecànic, aquests inconvenients provoquen grans pèrdues d'energia i càrregues mecàniques de xoc. Això té un efecte extremadament negatiu en la vida útil de l'equip.
Convertidor de freqüència

Convertidor de freqüència amb control d'amplada de pols (PE amb PWM) redueix els corrents d'entrada entre 4 i 5 vegades. Proporciona un arrencada suau del motor d'inducció i controla l'accionament segons una relació voltatge / freqüència determinada.
El convertidor de freqüència proporciona un estalvi d'energia de fins a un 50%. Es fa possible permetre la retroalimentació entre dispositius veïns, és a dir. equips autoajustables per a la tasca i canviant les condicions de funcionament de tot el sistema.
Principi de funcionament del convertidor de freqüència
El convertidor de freqüència PWM és inversor de doble conversió… Primer la tensió de xarxa de 220 o 380 V es rectifica pel pont de díodes d'entrada, després es suavitza i es filtra mitjançant condensadors.
Aquesta és la primera etapa de la transformació. En la segona etapa, des de tensió constant, utilitzant microcircuits de control i un pont de sortida Interruptors IGBT, es forma una seqüència PWM amb una freqüència i un cicle de treball determinats. A la sortida del convertidor de freqüència, s'emeten paquets de polsos rectangulars, però a causa de la inductància dels bobinatges de l'estator del motor d'inducció, s'integren i finalment es converteixen en una tensió propera a una sinusoide.
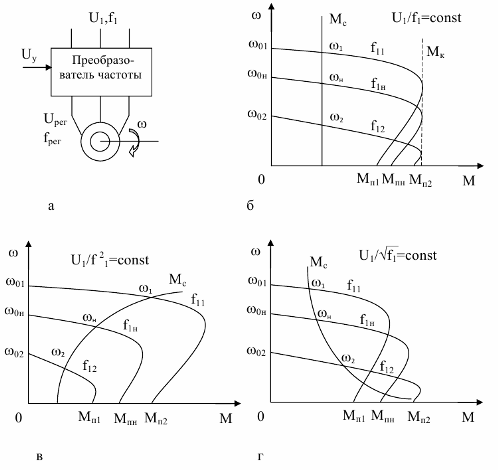 Característiques mecàniques d'un motor elèctric asíncron amb regulació de freqüència de velocitat: a — esquema de connexió; b — característiques d'una càrrega amb un moment de resistència estàtic constant; c — característiques de càrrega del ventilador; d — característiques del parell de càrrega estàtica, inversament proporcional a la velocitat angular de gir.
Característiques mecàniques d'un motor elèctric asíncron amb regulació de freqüència de velocitat: a — esquema de connexió; b — característiques d'una càrrega amb un moment de resistència estàtic constant; c — característiques de càrrega del ventilador; d — característiques del parell de càrrega estàtica, inversament proporcional a la velocitat angular de gir.
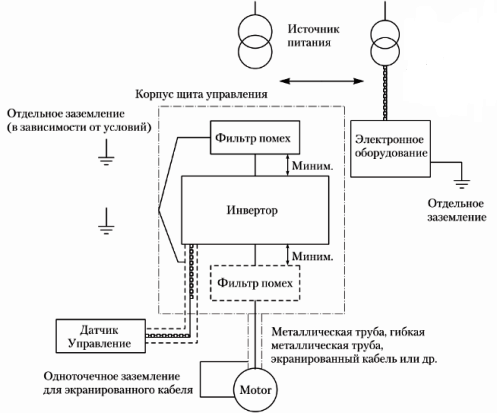 Un circuit típic per encendre un convertidor de freqüència
Un circuit típic per encendre un convertidor de freqüència 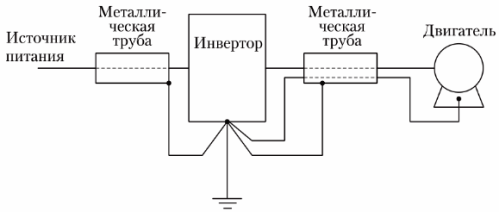 Un exemple de connexió de línies elèctriques (cables) en un circuit convertidor de freqüència
Un exemple de connexió de línies elèctriques (cables) en un circuit convertidor de freqüència
Criteris de selecció de convertidors de freqüència

Pel mètode de control
Descartar immediatament aquells convertidors que no siguin adequats pel que fa a potència, tipus de rendiment, capacitat de sobrecàrrega, etc. Segons el tipus de gestió has de decidir què triar, control escalar o vectorial.
La majoria dels convertidors de freqüència moderns implementen control vectorial, però aquests convertidors de freqüència són més cars que els convertidors de freqüència escalar.
El control vectorial permet un control més precís reduint l'error estàtic. El mode escalar només admet una relació constant entre la tensió de sortida i la freqüència de sortida, però per als ventiladors, per exemple, això és suficient.
Des dels seus inicis, el control vectorial s'ha convertit en una estratègia de control extremadament popular per als motors d'inducció. Actualment, la majoria dels convertidors de freqüència implementen control vectorial o fins i tot control vectorial sense sensor (aquesta tendència es troba en convertidors de freqüència que originalment implementen control escalar i no tenen terminals per connectar un sensor de velocitat).
El principi bàsic del control vectorial consisteix en una regulació independent independent del corrent de magnetització del motor i del corrent de quadratura, al qual el parell mecànic de l'eix és proporcional. El corrent de magnetització determina el valor de l'enllaç de flux zero del rotor i es manté constant.
Quan la velocitat s'estabilitza, el punt de consigna de corrent en quadratura es genera mitjançant un controlador PI independent l'entrada del qual és la discrepància entre la velocitat del motor desitjada i la mesurada. Així, el corrent de quadratura sempre s'estableix al nivell mínim per tal de proporcionar un parell mecànic suficient per mantenir la velocitat establerta. Per tant, el control vectorial té una alta eficiència energètica.
A través del poder
Si la potència de l'equip és aproximadament la mateixa, trieu convertidors de la mateixa empresa amb una capacitat segons la potència de la càrrega màxima. Això garantirà la intercanviabilitat i simplificarà el manteniment dels equips. Es recomana que el centre de servei del convertidor de freqüència seleccionat sigui a la vostra ciutat.
A través de la tensió de xarxa
Trieu sempre un convertidor amb el rang de tensió més ampli possible, tant cap avall com amunt. El fet és que per a les xarxes locals, la paraula estàndard només pot fer riure a través de les llàgrimes. Si la baixa tensió probablement farà que el convertidor de freqüència s'aturi, l'augment de la tensió pot provocar que els condensadors electrolítics de la xarxa explotin i que l'entrada del dispositiu falli.
Per rang d'ajust de freqüència

Pel nombre d'entrades de control
Es necessiten entrades discretes per introduir ordres de control (arrencada, parada, marxa enrere, parada, etc.). Es necessiten entrades analògiques per als senyals de retroalimentació (configuració i configuració del variador durant el funcionament). Les entrades digitals són necessàries per introduir senyals d'alta freqüència dels sensors digitals de velocitat i posició (codificadors). El nombre d'entrades mai pot ser massa gran, però com més entrades, més complex es pot construir el sistema i més car és.
Pel nombre de senyals de sortida
Les sortides discretes s'utilitzen per emetre senyals per a diversos esdeveniments (alarma, sobreescalfament, tensió d'entrada per sobre o per sota del nivell, senyal d'error, etc.). Les sortides analògiques s'utilitzen per construir sistemes de retroalimentació complexos. Les recomanacions de selecció són similars a les del paràgraf anterior.
Bus de control
L'equip amb el qual controlaràs el convertidor de freqüència ha de tenir el mateix bus i nombre d'entrades/sortides que el convertidor de freqüència seleccionat. Deixeu espai per a entrades i sortides per a futures actualitzacions.
En garantia
El període de garantia us permet indirectament avaluar la fiabilitat del convertidor de freqüència. Naturalment, hauríeu de triar un convertidor de freqüència amb un pla a llarg termini.Alguns fabricants preveuen específicament els casos de danys que no estan coberts per la garantia. Llegiu sempre amb atenció la documentació i cerqueu en línia ressenyes de models i fabricants d'equips. Això us ajudarà a prendre la decisió correcta. No estalvieu diners per un servei de qualitat i formació del personal.
 Convertidor de freqüència al suport
Convertidor de freqüència al suport
Capacitat de sobrecàrrega
Com a primera aproximació, la potència del convertidor de freqüència s'ha de seleccionar un 10-15% més que la potència del motor. El corrent del convertidor ha de ser superior al corrent nominal del motor i lleugerament superior al corrent de possibles sobrecàrregues.
En la descripció d'un mecanisme particular, s'acostumen a indicar els corrents de sobrecàrrega i la durada del seu flux. Llegeix la documentació! Això us mantindrà entretingut i possiblement evitarà danys a l'equip en el futur. Si la unitat també es caracteritza per càrregues de xoc (pics) (càrregues durant 2-3 segons), cal triar un convertidor per al corrent màxim. Torna a prendre un marge del 10%.
Veure també sobre aquest tema: Convertidors de freqüència VLT AQUA Drive per a unitats de bomba