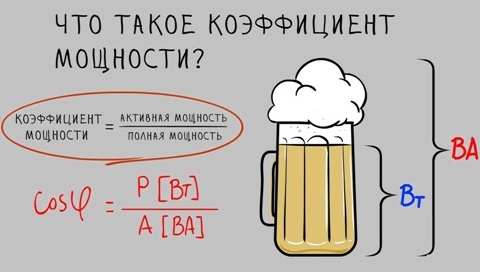
Què és el factor de potència (cosinus Phi)
 El factor de potència d'una persona física (cosinus phi) és el següent. Com sabeu, en un circuit de CA, generalment hi ha tres tipus de càrrega o tres tipus de potència (tres tipus de corrent, tres tipus de resistència). Les potències P activa, Q reactiva i C total estan relacionades amb la resistència activa r, x reactiva i z total, respectivament.
El factor de potència d'una persona física (cosinus phi) és el següent. Com sabeu, en un circuit de CA, generalment hi ha tres tipus de càrrega o tres tipus de potència (tres tipus de corrent, tres tipus de resistència). Les potències P activa, Q reactiva i C total estan relacionades amb la resistència activa r, x reactiva i z total, respectivament.
Des del curs d'enginyeria elèctrica se sap que la resistència s'anomena activa, en la qual s'allibera calor quan passa el corrent. La resistència activa s'associa a les pèrdues de potència activa dPnIgual al quadrat del corrent multiplicat per la resistència dPn = Az2r W
Reacció quan hi passa corrent, no provoca pèrdues. Aquesta resistència es deu a la inductància L així com a la capacitat C.
La resistència inductiva i la capacitiva són dos tipus de reactàncies i s'expressen amb les fórmules següents:
-
reactància o resistència inductiva,
-
resistència o capacitat capacitiva,
Aleshores x = xL — НС° С… Per exemple, si al circuit xL= 12 Ohm, xc = 7 Ohm, aleshores la reactància del circuit x = xL — NSc= 12 — 7 = 5 Ohm.
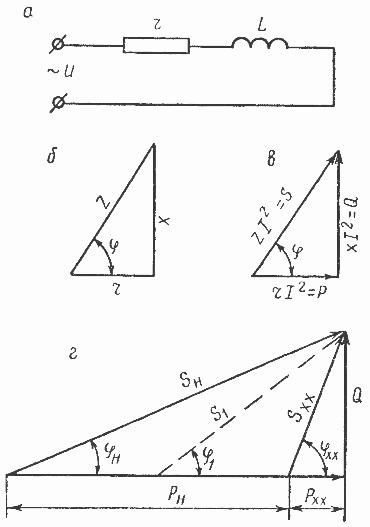
Arròs. 1. Il·lustracions per explicar l'essència del cosinus «phi»: a — circuit de connexió en sèrie de r i L en un circuit de corrent altern, b — triangle de resistència, c — triangle de potència, d — triangle de potència a diferents valors de potència activa.
La impedància z inclou la resistència i la reactància. Per a una connexió en sèrie de r i L (Fig. 1, a), es representa gràficament un triangle de resistència.
Si els costats d'aquest triangle es multipliquen pel quadrat del mateix corrent, aleshores la relació no canviarà, però el nou triangle serà un triangle de capacitat (Fig. 1, c). Consulteu més detalls aquí - Triangles de resistències, tensions i potències
Tal com es veu des del triangle, en un circuit de CA, generalment es produeixen tres potències: P activa, Q reactiva i S total.
P = Az2r = UIcosphy W,B = Az2x = Az2NSL — I2x° C = UIsin Var, S = Az2z = UIQuè.
La potència activa es pot anomenar potència de treball, és a dir, "escalfa" (emissió de calor), "llum" (il·luminació elèctrica), "es mou" (acciona el motor elèctric), etc. Es mesura de la mateixa manera que la potència constant , en watts.
Desenvolupat potència activab completament sense deixar rastre es consumeix en receptors i cables de plom a la velocitat de la llum, gairebé instantàniament. Aquest és un dels trets característics de la potència activa: tant com es genera, tant es consumeix.
La potència reactiva Q no es consumeix i representa l'oscil·lació de l'energia electromagnètica en un circuit elèctric.El flux d'energia de la font al receptor i viceversa està relacionat amb el flux de corrent a través dels cables, i com que els cables tenen resistència activa, hi ha pèrdues en ells.
Així, amb la potència reactiva no es fa treball, sinó que es produeixen pèrdues, que per a una mateixa potència activa, com més gran, menor és el factor de potència (cosphi, cosinus «phi»).
Un exemple. Determineu la pèrdua de potència en una línia amb resistència rl = 1 ohm si per ella es transmet potència P = 10 kW a una tensió de 400 V una vegada a cosphi1 = 0,5 i la segona vegada a cosphi2 = 0,9.
Respon. Corrent en el primer cas I1 = P / (Ucosphi1) = 10/(0,4•0,5) = 50 A.
Pèrdua de potència dP1 = Az12rl = 502•1 = 2500 W = 2,5 kW.
En el segon cas, el corrent Az1 = P / (Ucosphi2) = 10/(0,4•0,9) = 28 A.
Pèrdua de potència dP2 = Az22rl = 282•1 = 784 W = 0,784 kW, és a dir. en el segon cas la pèrdua de potència és 2,5 / 0,784 = 3,2 vegades menor només perquè el valor de cosfi és més alt.
El càlcul mostra clarament que com més gran sigui el valor del cosinus «phi», menor serà la pèrdua d'energia i menys necessitat de col·locar metalls no fèrrics en instal·lar noves instal·lacions.

Augmentant el cosinus «phi» tenim tres objectius principals:
1) estalvi d'energia elèctrica,
2) estalvi de metalls no fèrrics,
3) aprofitament màxim de la potència instal·lada de generadors, transformadors i en general motors de corrent altern.
L'última circumstància es confirma pel fet que, per exemple, d'un mateix transformador és possible obtenir com més potència activa, més valor dels usuaris de cosfi.Així, d'un transformador amb una potència nominal Sn= 1000 kVa a cosfi1 = 0,7 es pot obtenir la potència activa P1 = Снcosfie1 = 1000 • 0,7 = 700 kW, i a cosfi2 = 0,95 R2 = Сncosfi2= 1000 = • 09095. kW.
En ambdós casos el transformador estarà plenament carregat a 1000 kVA. Els motors d'inducció i els transformadors de subcàrrega són la causa del baix factor de potència a les fàbriques. Per exemple, un motor d'inducció a velocitat de ralentí té un cosfixx aproximadament igual a 0,2, mentre que quan es carrega a una potència nominal de sfin = 0,85.
Per a una major claredat, considereu un triangle de potència aproximat per a un motor d'inducció (Fig. 1, d). Durant el funcionament inactiu, el motor d'inducció consumeix una potència reactiva aproximadament igual al 30% de la potència nominal, mentre que la potència activa consumida en aquest cas és al voltant del 15%. Per tant, el factor de potència és molt baix. A mesura que augmenta la càrrega, augmenta la potència activa i la potència reactiva canvia marginalment i, per tant, augmenta el cosfi. Llegeix més sobre això aquí: Factor de potència de la unitat
La principal activitat que augmenta el valor del cosfi és operar a plena capacitat de producció. En aquest cas, els motors asíncrons funcionaran amb factors de potència propers als valors nominals.
Les activitats de millora del factor de potència es divideixen en dos grans grups:
1) no requereix instal·lació de dispositius compensadors i adequat en tots els casos (mètodes naturals);
2) relacionats amb l'ús de dispositius compensadors (mètodes artificials).
 Unitat de condensació per augmentar el factor de potència
Unitat de condensació per augmentar el factor de potència
Les activitats del primer grup, d'acord amb les directrius vigents, inclouen la racionalització del procés tecnològic, que condueix a la millora del mode energètic dels equips i l'augment del factor de potència. Les mateixes mesures inclouen l'ús de motors síncrons en comptes d'alguns de asíncrons (es recomana la instal·lació de motors síncrons en comptes d'asincrònics quan sigui necessari per augmentar l'eficiència).
Llegiu també sobre aquest tema: Alimentació de CA i pèrdues de potència