Robots industrials en la producció moderna: tipus i dispositius
Els robots industrials s'utilitzen àmpliament avui en dia en la producció humana. Serveixen com un dels mitjans més efectius de mecanització i automatització de les operacions de transport i càrrega, així com molts processos tecnològics.
L'efecte positiu de la introducció de robots industrials es nota simultàniament des de diversos costats: la productivitat laboral augmenta, la qualitat del producte final millora, els costos de producció disminueixen, les condicions de treball d'una persona milloren i, finalment, la transició d'una empresa del el llançament d'un tipus de producte en un altre es facilita molt.
Tanmateix, per tal d'aconseguir un efecte positiu tan extens i polifacètic de la introducció de robots industrials en una producció manual que ja funciona, cal calcular per endavant els costos previstos pel propi procés d'implementació, pel preu del robot i també per ponderar si la complexitat del seu procés productiu i tecnològic és generalment l'adequat per al pla de modernització per ajudar a instal·lar robots industrials.
De fet, de vegades inicialment la producció està tan simplificada que la instal·lació de robots és simplement poc pràctic i fins i tot perjudicial. A més, es requerirà personal qualificat per a la configuració, manteniment, programació de robots, i en el procés de treball - dispositius auxiliars, etc. És important tenir-ho en compte amb antelació.
D'una manera o altra, les solucions robòtiques no tripulades en producció són cada cop més rellevants avui dia, encara que només sigui perquè l'impacte nociu sobre la salut humana es redueix al mínim. Afegim aquí la comprensió que el cicle complet de processament i instal·lació es fa més ràpid, sense pauses per a les pauses de fum i sense errors inherents a qualsevol producció on actua una persona viva en lloc d'un robot. El factor humà, després de muntar els robots i iniciar el procés tecnològic, queda pràcticament exclòs.
Avui en dia, el treball manual es substitueix en la majoria dels casos pel treball d'un manipulador robòtic: agafada d'eines, fixació d'eines, retenció de peça, alimentació a l'àrea de treball. Les limitacions només s'imposen per: capacitat de càrrega, àrea de treball limitada, moviments preprogramats.
El robot industrial és capaç de proporcionar:
-
alta productivitat gràcies al posicionament ràpid i precís; millor eficiència, ja que no cal pagar sous a les persones que substitueix, n'hi ha prou amb un operador;
-
alta qualitat — precisió de l'ordre de 0,05 mm, baixa probabilitat de matrimoni;
-
seguretat per a la salut humana, per exemple, pel fet que quan es pinta, ara s'exclou el contacte humà amb pintures i vernissos;
-
Finalment, l'àrea de treball del robot està estrictament limitada i requereix un manteniment mínim, encara que l'entorn de treball sigui químicament agressiu, el material del robot suportarà aquest impacte.

Històricament, el primer robot industrial patentat va ser llançat el 1961 per Unimation Inc per a la planta de General Motors a Nova Jersey. La seqüència d'accions del robot s'enregistra en forma de codi en un tambor magnètic i s'executa en coordenades generalitzades. Per realitzar accions, el robot utilitza amplificadors hidràulics. Aquesta tecnologia es va transferir posteriorment a les japoneses Kawasaki Heavy Industries ia l'anglès Guest, Keen i Nettlefolds, per la qual cosa la producció de robots d'Unimation Inc es va expandir una mica.
L'any 1970, la Universitat de Stanford havia desenvolupat el primer robot que s'assemblava a les capacitats d'un braç humà amb 6 graus de llibertat, que estava controlat per un ordinador i tenia accionaments elèctrics. Al mateix temps, l'empresa japonesa Nachi l'està desenvolupant. L'Alemanya KUKA Robotics demostraria el robot de sis eixos Famulus el 1973, i la suïssa ABB Robotics començaria a vendre el robot ASEA, també de sis eixos i accionat electromecànicament.
El 1974, l'empresa japonesa Fanuc va establir la seva pròpia producció. El 1977 es va produir el primer robot Yaskawa.Amb el desenvolupament de la tecnologia informàtica, els robots s'introdueixen cada cop més a la indústria de l'automòbil: a principis dels anys 80, General Motors va invertir quaranta mil milions de dòlars en la formació del seu propi sistema d'automatització de fàbriques.
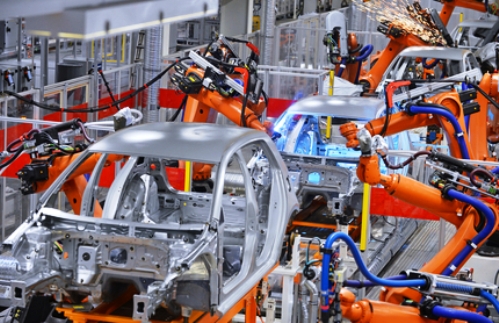
El 1984, Avtovaz nacional adquiriria una llicència de KUKA Robotics i començaria a produir robots per a les seves pròpies línies de producció. Gairebé el 70% de tots els robots del món, l'any 1995, estaran al Japó, el seu mercat nacional. D'aquesta manera, els robots industrials s'establiran finalment a la indústria de l'automoció.

Com funciona la fabricació d'automòbils sense soldadura? De cap manera. Així doncs, resulta que totes les indústries de l'automoció del món estan equipades amb centenars de complexos de soldadura robòtica. Cada cinquè robot industrial està implicat en la soldadura. La següent demanda és un carregador robòtic, però la soldadura per arc d'argó i punts són primer.
Cap soldadura manual pot igualar la qualitat de la costura i el grau de control del procés amb un robot especialitzat. Què passa amb la soldadura làser, on des d'una distància de fins a 2 metres mitjançant un làser enfocat, el procés tecnològic es porta a terme amb una precisió de 0,2 mm: és simplement insubstituïble en la construcció d'avions i la medicina. A això s'afegeix la integració amb sistemes digitals CAD/CAM.
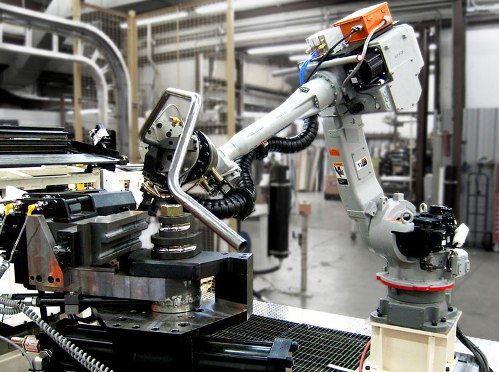
El robot de soldadura té tres unitats operatives principals: un cos de treball, un ordinador que controla el cos de treball i la memòria. El cos de treball està equipat amb un mànec semblant a una mà. El cos té llibertat de moviment al llarg de tres eixos (X, Y, Z) i la pinça pot girar al voltant d'aquests eixos. El mateix robot pot moure's per les guies.

Cap instal·lació de producció moderna pot prescindir de la descàrrega i la càrrega, independentment de la mida i el pes dels productes. El robot instal·larà la peça de manera independent a la màquina, després la descarregarà i col·locarà. Un robot pot interactuar amb diverses màquines simultàniament. Per descomptat, no podem deixar d'esmentar en aquest context la càrrega d'equipatge a l'aeroport.
Els robots ja permeten reduir al mínim els costos de personal. No es tracta només de funcions senzilles com la perforació o el funcionament del forn. Els robots són capaços d'aixecar més peses en condicions molt més difícils, sense cansar-se i passar molt menys temps del que faria una persona viva.
A les foneries i als ferrers, per exemple, les condicions són tradicionalment molt difícils per a les persones. Aquest tipus de producció ocupa el tercer lloc després de la descàrrega i la càrrega pel que fa a la robotització. No és casualitat que gairebé totes les fundicions europees estiguin equipades ara amb sistemes automatitzats amb robots industrials. El cost d'implementar un robot costa a l'empresa centenars de milers de dòlars, però apareix un complex molt flexible a la seva disposició, que està més que compensat.

Làser robòtic i tall per plasma millorar les línies tradicionals amb torxes de plasma. Tall tridimensional i tall de cantonades i bigues en I, preparació per a posterior processament, soldadura, perforació. A la indústria de l'automòbil, aquesta tecnologia és simplement insubstituïble, ja que les vores dels productes s'han de tallar amb precisió i rapidesa després de l'estampació i la conformació.
Un d'aquests robots pot combinar tant la soldadura com el tall.La productivitat s'incrementa amb la introducció del tall per raig d'aigua, que elimina l'exposició innecessària a la calor del material, així, en dos minuts i mig, es tallen tots els petits forats del metall dels coupés Renault Espace a la planta robòtica de Renault a França.
En la fabricació de mobles, automòbils i altres productes, la flexió robòtica del tub amb un capçal de treball és útil quan un robot col·loca el tub i es doblega molt ràpidament. Aquesta canonada ara es pot equipar amb diversos elements que no interfereixin amb el procés de flexió dels mandrils per part del robot.
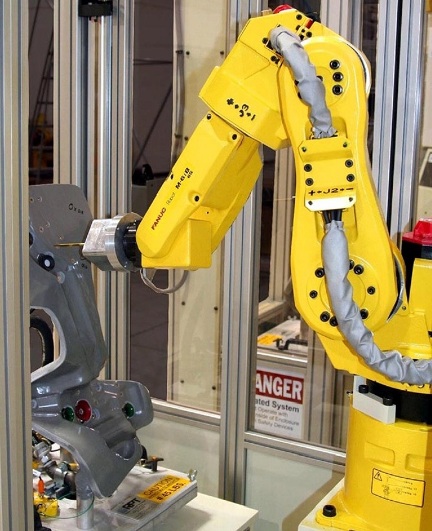
Vores, trepat i fresat: què podria ser més fàcil per a un robot, ja sigui de metall, fusta o plàstic. Els manipuladors precisos i duradors gestionen aquestes tasques amb una explosió. L'àrea de treball no està limitada, n'hi ha prou amb instal·lar un eix allargat o diversos eixos controlats, que donaran una excel·lent flexibilitat i alta velocitat. Un no pot fer això.
Les freqüències de rotació de l'eina de fresat arriben a desenes de milers de revolucions per minut i la mòlta de les costures es transforma completament en una sèrie de moviments repetitius senzills. Però antigament, el poliment i el tractament de superfícies abrasives es consideraven quelcom brut i pesat, i també molt nociu. La pasta ara s'alimenta automàticament durant el processament de la roda de feltre després de passar la cinta abrasiva. Ràpid i segur per a l'operador.
Les perspectives de la robòtica industrial són enormes, ja que els robots es poden introduir fonamentalment en gairebé qualsevol procés de producció i en quantitats il·limitades.La qualitat del treball automàtic de vegades és tan alta que simplement és inassolible per a les mans humanes. Hi ha grans indústries senceres on els errors i les imprecisions són inacceptables: fabricació d'avions, equips mèdics de precisió, armes d'ultra precisió, etc. Sense oblidar l'augment de la competitivitat de les empreses individuals i l'efecte positiu en la seva economia.