Circuits de control d'accionament elèctric
 Depenent de la velocitat dels ascensors de passatgers, s'adopten els següents tipus de circuits de control de potència:
Depenent de la velocitat dels ascensors de passatgers, s'adopten els següents tipus de circuits de control de potència:
-
Els ascensors de baixa velocitat tenen motors de gàbia d'esquirol o rotor de fase i un control de botó o palanca,
-
ascensors d'alta velocitat: motors de dues o una velocitat controlats per estacions magnètiques o estacions de control de tiristors (TSU-R) amb botons de control,
-
ascensors d'alta velocitat i alta velocitat - motors de corrent continu controlats pel sistema "generador - motor" amb diferents esquemes d'excitació o pel sistema "convertidor de tiristors - motor" amb botons,
-
També es poden utilitzar cadenes de cascades de vàlvules asíncrones (AVK), l'ús de les quals permet augmentar l'eficiència. instal·lació.
Els ascensors de passatgers, depenent del flux de passatgers, l'alçada d'elevació i el nombre d'ascensors que donen servei als passatgers, es divideixen en control individual i grup.
Els solters inclouen:
a) Els ascensors que funcionen amb ordres i trucades individuals sense parades de pas durant el descens i l'ascens dels passatgers,
b) Ascensors amb embarcament de passatgers en baixar, però amb prohibició de trucar en pujar,
c) els mateixos, però amb registre de convocatòries en descendir amb la seva posterior execució.
Els ascensors operats en grup inclouen:
a) ascensors amb un botó per trucar als llocs d'aterratge, independentment del nombre d'ascensors instal·lats (s'utilitza més sovint el doble control) i amb embarcament de passatgers en baixar,
b) igual, però amb la recollida completa de passatgers a les plantes intermèdies per a l'embarcament i el desembarcament (normalment instal·lats en edificis administratius, educatius i altres).
A més, és molt habitual enviar ascensors a diverses cases i barris sencers, quan es controla l'estat dels circuits des d'una consola de despatxos i es controlen diversos ascensors.
Independentment de la velocitat dels ascensors, control individual o grupal dels mateixos, els elements necessaris de la majoria dels seus esquemes són els següents:
-
botons autoajustables, botons enganxosos o de tancament per trucar als taxis i donar una ordre des de la cabina,
-
diversos sensors de selecció i dispositius de concordança de parada precisa per registrar la ubicació de la cabina i l'estat dels circuits elèctrics,
-
sensors i enclavaments per a l'estat de les cordes d'elevació, l'estat de la mina i les portes de la cabina (obertes o tancades),
-
interruptors de límit per limitar la velocitat i el grau de càrrega de la cabina,
-
indicadors de la direcció del moviment del cotxe i, en alguns ascensors, la presència d'una càrrega al cotxe.
D'aquests elements, ens detenem amb més detall en els dispositius de concordança de posició (PSC), que determinen el lloc on s'ha d'aturar el cotxe de la mina quan es produeix una trucada o una comanda, i el seu moviment cap amunt o cap avall.Els elements restants solen ser diverses modificacions d'interruptors de límit conegudes d'altres cursos.
Estructuralment, els dispositius de concordança de posició s'implementen en forma d'un conjunt de sensors electromecànics, inductius o magnètics de tres posicions situats a les mines, amb senyals de sortida a un relé o selector sense contacte a la sala de màquines (de vegades s'implementen els CCP). en forma d'unitats de planta central situades a la sala de màquines)...
Els sensors situats a la mina interactuen amb les branques muntades a la cabina (per a electromecànics) o shunts magnètics (per a interruptors inductius o de canya) i envien senyals a la unitat central de planta (copiadora esglaonada o relé de relé) instal·lada a la sala de màquines, i la aquest últim transmet i un circuit de control: un senyal per executar la comanda rebuda.
És més convenient col·locar els sensors dels senyals de moviment del cotxe amunt o avall del cotxe (es necessiten menys cables) i instal·lar derivacions magnètiques a les mines als punts necessaris. En aquest cas, amb el control digital, el nombre de columnes amb derivacions instal·lades al llarg de l'eix és igual al nombre de bits del número de planta transmès en codi binari o un altre codi.
Els interruptors electromecànics de tres posicions es mouen a una de les posicions corresponents al moviment de la cabina cap amunt o cap avall, o la seva parada, mitjançant una disposició de curling.En aquest cas, quan el cotxe està en moviment, els contactes dels interruptors dels pisos passats s'encenen a una de les posicions finals, preparant-se per a l'acció de la cadena de trucades i ordres, i quan el cotxe s'atura, l'interruptor es posa. es mou a la posició mitjana, apagant el circuit de control dels contactors direccionals i, per tant, exclou que el cotxe surti del pis quan es prem el botó de comanda o de trucada per error.
Per tal d'assegurar una frenada relativament precisa de la cabina de l'ascensor, recentment es van començar a utilitzar sensors de control magnètic (canyes) inductius sense contacte o segellats per contacte als seus circuits de control. Aquests sensors s'instal·len tant a la mina com a la cabina: a la mina hi ha sensors per a la selecció (desacceleració), i a la cabina hi ha un sensor per a una parada precisa. Per connectar amb els sensors, es col·loca una derivació magnètica selectiva de llanterna a la cabina i es col·loquen derivacions ferromagnètiques de parada de precisió a l'eix (a cada pis).
Els sensors inductius consisteixen en un circuit magnètic obert en forma d'U amb una bobina tancada en una carcassa. El bobinatge del relé executiu està connectat en sèrie amb ell i se'ls aplica una tensió de corrent altern (U).
Amb un circuit magnètic obert, el flux magnètic que travessa la bobina és petit. D'aquí l'e.m.f. i el corrent d'autoinducció als cables de la bobina, així com la resistència inductiva (X) causada per aquest, pràcticament estan absents, de manera que la resistència de la bobina està activa (R). El corrent a les bobines connectades en sèrie és relativament gran; imita el tancament dels contactes en el sistema de contactes (el relé s'encén).
Quan la derivació tanca el circuit magnètic en forma d'U, augmenta el flux magnètic que travessa la seva bobina i, per tant, augmenta la fem. l'autoinductància així com la resistència inductiva de la bobina deguda a aquesta. Com a resultat, el corrent a les bobines connectades en sèrie disminueix, simulant l'obertura del circuit en el sistema de contactes (el relé executiu està apagat).
L'interruptor de canya és un cos en forma d'U en el qual a un costat de la ranura es col·loquen dos matràs de vidre segellats amb un buit a l'interior i contactes fixats en plaques de molla que es connecten als circuits de control de l'ascensor respectius. A l'altre costat de la ranura hi ha un imant permanent. L'element de treball d'aquests sensors és una derivació ferromagnètica que passa pel tall en forma d'U quan el cotxe de l'ascensor es mou.
El principi de funcionament d'aquests sensors és el següent: les forces de molla de les plaques de contacte dels interruptors de canya es dirigeixen de manera que si el camp d'un imant permanent no actua sobre elles, els contactes normalment oberts estan oberts i els els contactes tancats estan tancats, és a dir. els circuits als quals estan connectats aquests contactes s'obriran o tancaran.
Aquesta condició d'interruptor de canya serà quan la derivació ferromagnètica es trobi a la ranura d'un cos en forma d'U, perquè les línies de camp magnètic de l'imant permanent es tanquen a través de la derivació. Un cop la derivació surt de la ranura, les línies de camp magnètic es tanquen a través de la ranura. les plaques, superant la seva acció de molla, i els contactes de l'interruptor de canya, i per tant els circuits als quals estan connectades, passen a l'estat contrari.

Com a exemple que reflecteix les característiques principals dels esquemes de control d'ascensor, considereu l'esquema de control d'un únic ascensor sense parades associades que es mostra a la figura 1. 1. L'ascensor dóna servei a quatre plantes; un motor asíncron M de dues velocitats s'utilitza com a motor executiu.
La inclusió de revolucions baixes (Ml) o altes (B) del motor es realitza mitjançant els contactors corresponents Ml i B. El sentit de gir del motor està determinat pels contactors B i H, desacceleració — mitjançant una resistència addicional P, aturada — per fre electromagnètic ET.
S'utilitza com a interruptors de terra sensors inductius sense contacte (DTS, DTOV i DTON) connectats en sèrie amb les bobines del relé (RIS, RITOV, RITON). Els sensors TTP s'utilitzen per encendre l'ascensor a gran velocitat i donar un impuls per reduir la velocitat, mentre que els sensors DTOV i DTON estan dissenyats per aturar l'ascensor amb precisió al nivell del pis corresponent i es col·loquen al cotxe. shunts magnètics per a ells s'instal·len a l'eix de l'eix.
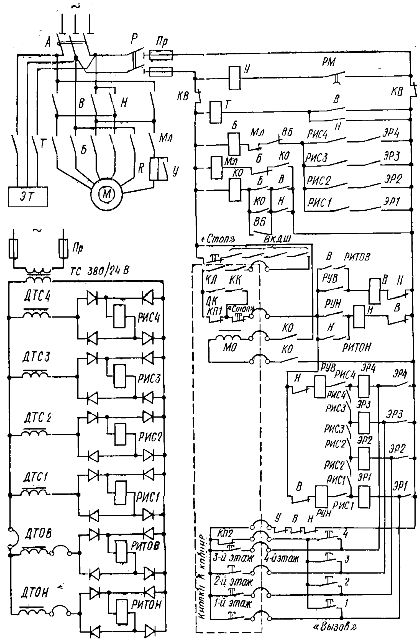
Arròs. 1. Esquema d'un control d'un únic ascensor
Considerem la finalitat dels elements restants del circuit i el seu funcionament utilitzant l'exemple de traslladar una cabina amb un passatger del 1r al 3r pis, suposant que la màquina automàtica A, el seccionador P i els interruptors de final de carrera KB limiten la moviment de la cabina amunt i avall en modes d'emergència, estan tancades i la cabina es troba a la planta baixa. En aquest cas, les bobines del relé RIS, a més del relé del primer pis, flueixen del corrent nominal.
Quan es prem el botó «3r pis», es forma el següent circuit elèctric: fase de xarxa — pol del seccionador P — fusible Pr — interruptor final KB — botó «Stop» — bloqueig de les portes de la mina D1 — D4 — contactes per tensar la corda KK — interruptor final de seguretat KL — interruptors de la porta de la cabina DK — contactes del botó «Stop» — bloc d'obertura -contacte Н — bobina del relé RUV — contactes de tancament dels relés RIS4 i RISZ (les bobines d'aquests relés porten corrent) — bobina del relé de planta ERZ — botó «3r pis» — blocs d'obertura — contactes dels contactors U, B, N — interruptor final KB — fusible R — pol seccionador P — fase de xarxa.
Després de l'activació del relé RUV i ER3, s'encenen el contactor de desplaçament cap endavant B, el contactor de viatge ràpid B (al circuit de la bobina B - contacte de bloc ML - interruptor d'alta velocitat VB - contactes de relé RISZ i ER3). Quan els contactes B i B estan tancats, el motor es connecta a la xarxa elèctrica, el contactor T, la politja d'alliberament i el contactor de derivació KO, que encén el solenoide de derivació MO i prepara el circuit de la bobina del contactor de baixa velocitat Ml. encès. La carrera es retrau, alliberant la palanca de bloqueig i la cabina comença a moure's.
Quan la cabina s'acosta al tercer pis, la derivació ferromagnètica tanca la bobina del sensor TTSZ, la seva resistència augmenta i el relé RISZ desapareix, apagant els relés ER3 i RUV. Com a resultat, el contactor B desapareix, tancant el seu contacte, activa el contactor de baixa velocitat Ml i el contactor B roman encès, perquè quan el cotxe es mou, el circuit magnètic del sensor de fre precís encara no està tancat, per tant, el El contacte de RITOV encara no està obert.El motor s'atura a baixa velocitat funcionant en mode generador amb una resistència R. introduïda en una fase de l'estator.
Tan bon punt el terra del cotxe s'alinea amb el terra del terra, la derivació magnètica tanca el circuit magnètic de la bobina del sensor de parada exacta DTOV, el relé RITOV desapareix i els contactors B, després KO i finalment ML s'engeguen Com a resultat, l'electroimant del motor i el fre es desconnecten de la xarxa elèctrica, s'aplica el fre mecànic i la cabina s'atura.
Aprendre un esquema col·lectiu per controlar els ascensors amb parades de pas només en baixar el cotxe o un esquema totalment col·lectiu, és a dir. en passar parades mentre el cotxe es mou cap amunt i cap avall, és necessari en un esquema semblant al que s'explica a la fig. 1, introduïu algunes addicions. Per exemple, en un circuit de motor de dues velocitats, s'inclouen els sensors inductius d'ID, el relé RIS i els botons de trucada i comanda de cada pis, tal com es mostra a la figura. 2.
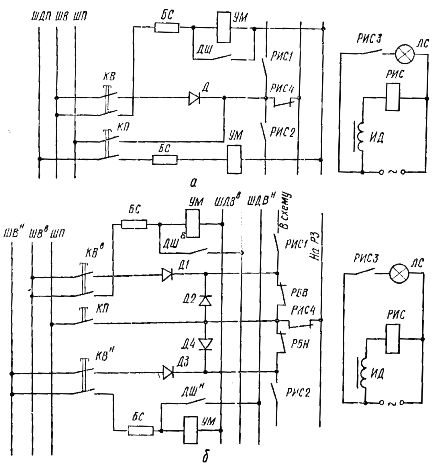
Arròs. 2. Fragments d'addicions als esquemes de control col·lectiu d'ascensors (una planta)
En un esquema amb parades de pas en baixar la cabina (Fig. 2, a), les trucades i les ordres es donen mitjançant botons adhesius separats i, per tant, es poden registrar en qualsevol moment i transmetre'ls a l'esquema immediatament, excepte pel període de moviment del cabina amb els passatgers amunt quan el bus de subministrament dels contactes de transferència les trucades al circuit executiu es desactiven mitjançant contactes selectius del bus positiu.
A l'esquema complet de control selectiu (Fig. 2, b) hi ha, addicionalment, circuits de trucada per a cabines d'embarcament (ШДВв) i baixada (ШДВн), els contactes dels relés de bloqueig RBV i RBN estan connectats als contactes del circuit executiu del circuit selectiu selectiu. .
En els diagrames que es mostren a les Figs. 1 i 2, en absència de cabina a terra, les bobines del sensor inductiu ID i el relé RIS estan energitzades. Per tant, quan premeu el botó de comandament o truqueu a KV (els imants de retenció de l'UM els mantenen en l'estat fins que són superats pels contactes de les portes de la mina d'aquest pis del DSh), es forma un circuit (no mostrat a les figures) que inclou el relé de control de pujada RUV si la planta de destinació és més alta que la planta de l'aparcament, o el relé de control de baixada LVL si la planta de destinació està per sota de l'aparcament.
Després de l'arribada del cotxe a la planta de trucades, es ventila l'ID del sensor inductiu, s'apaga el relé RIS, obrint els seus contactes, que apaga el relé RUV o RUN i el llum LS (el cotxe s'atura) i tancant el contacte RIS4, es prepara un circuit per a l'execució de l'ordre procedent del cotxe.
En el circuit col·lectiu complet, el circuit dividit pels contactes RIS1 i RIS2 al terra de l'aparcament del cotxe es trenca no només per aquests contactes, sinó també pels contactes del relé de bloqueig amunt RBV o avall RBN (les seves bobines). no es mostren al diagrama), i els circuits de pujada, baixada i ordenació estan separats entre si mitjançant díodes separadors D1 - D4.
Abans de prémer el botó de trucada o comanda, si encara no s'ha seleccionat el sentit de la marxa del vehicle, es tanquen tots els contactes del circuit de selecció de sentit, excepte els contactes RIS4 de la planta d'aparcament.Per tant, quan es prem un d'aquests botons, els senyals de trucada dels pisos situats per sobre del terra de l'aparcament es connecten a la bobina del relé RUN, i els senyals de trucada dels pisos de sota de l'aparcament inclouen el relé RUV. Després de seleccionar la direcció, simultàniament amb el relé RUV o LVL, s'encén un dels relés de bloqueig de direcció oposada RBV o RBN, que interromp la sortida a través del circuit seccional de senyals de trucada no transitoris amb els seus contactes.
En l'esquema mostrat a la fig. 2, a, per baixar els passatgers, la cabina va sense parar al pis més alt de la conversa i després baixa amb parades de pas, i en el diagrama que es mostra a la fig. 2, b, si és necessari recollir passatgers, la cabina es dirigeix al pis més baix de la trucada, després puja amb parades de pas.
En els esquemes considerats, els selectors es fan en elements de relé. Juntament amb això, s'utilitzen altres selectors: lleva, fotoelèctric, seguiment de raspall continu, trepitjada, sobre elements estàtics, etc.
Amb grans fluxos de viatgers, s'instal·len diversos ascensors en un mateix passadís, que han combinat el control per parelles o grups per augmentar la comoditat i millorar la potència. El nombre d'ascensors connectats en grups no sol superar els quatre, sinó més sovint tres, encara que es coneixen sistemes que contenen fins a vuit ascensors en un grup.
En el control de grup, normalment hi ha tres modes principals de funcionament de l'ascensor: ascens màxim, descens màxim i moviment equilibrat en ambdues direccions. L'activació dels ascensors per a una o altra modalitat la realitza el despatxador o automàticament mitjançant el rellotge de programació instal·lat per a cada grup d'ascensors.
En edificis de gran alçada, cada grup d'ascensors està fixat per donar servei a una determinada àrea de pisos, altres pisos no són atesos per ella. Si hi ha diversos ascensors al grup que donen servei a una zona o un edifici de poca alçada, per tal d'augmentar la velocitat mitjana de moviment reduint el nombre de parades, es poden assignar ascensors separats per donar servei als pisos parells i imparells.
Per efectuar el control dual o grupal dels ascensors, els seus circuits de control han de ser col·lectius i les trucades a cada planta en ambdues direccions s'han de registrar per separat en cada sentit mitjançant dispositius d'emmagatzematge adequats que continguin relés, transistors, etc.
Com a exemple que reflecteix les especificitats de funcionament en el control aparellat d'ascensors amb relés d'aparcament addicionals del primer ascensor 1PC i del segon ascensor 2PC, considereu un fragment del diagrama esquemàtic que es mostra a la fig. 3.
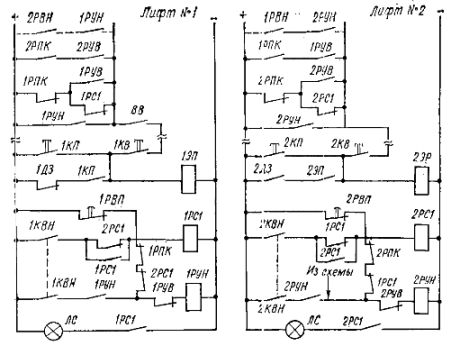
Arròs. 3. Fragment d'un diagrama esquemàtic de control d'ascensor aparellat: ER — relé de planta, RPK — relé de commutació de canal, relé d'arrencada automàtic RVP
En aquest cas, el cotxe que ha baixat amb passatgers al primer pis no atén les trucades d'altres plantes i espera passatgers. Si no hi ha cotxe al primer pis, el cotxe que s'ha aixecat per ordre i s'allibera s'envia automàticament al primer pis, i quan un altre cotxe es baixa o s'aparca, l'últim roman al pis al final del vol. o va al centre de càrrega i s'utilitza per a l'operació de trucades principalment en la direcció d'enfonsament.
El relé d'aparcament de la cabina del primer pis 1PC1 o 2PC1 s'activa després de l'arribada de la cabina del primer pis des de l'interruptor de límit 1KVN o 2KVN (instal·lat a les mines de fotocopiadora). Aquests relés estan bloquejats.Per tant, la inclusió d'un d'ells indica que aquest cotxe va arribar a la primera planta abans que l'altre. En aquest cas, el relé 1PC1 o 2PC1 amb el seu contacte de tancament encén el llum de senyalització LS i amb el seu contacte d'obertura trenca el circuit de timbre del seu ascensor, interrompent la trucada mentre el cotxe està aparcat al primer pis.
Quan el cotxe surt del primer pis, el seu llum de senyal LS s'apaga, l'alimentació dels circuits cridats d'aquest ascensor es restableix immediatament després d'alliberar el cotxe, i després que el cotxe d'un altre ascensor arribi al primer pis, el seu relé de l'ordinador s'encén. encès. Aquesta cabina roman a la planta baixa i espera els passatgers (cosa que es senyalitza amb l'encesa del llum d'advertència LS). Quan s'allibera el cotxe que ha arribat a l'ordre i no hi ha trucades, s'envia un senyal al circuit que encén les bobines del relé 1RUN o 2RUV 1RUN o 2RUV a través dels contactes d'obertura de l'interruptor de límit 1KVN o 2KVN, i el cotxe va al primer pis, i t .n.
Els equips de control de motor dels ascensors de control individuals, dobles i grupals típics es troben normalment en panells, estacions o unitats de control típics instal·lats a les sales de màquines.