Dispositius pneumàtics de sistemes mecatrònics
Les màquines mòbils, els robots i diversos sistemes mecatrònics tenen la capacitat de moure o canviar la posició de les seves peces gràcies als actuadors. La direcció del moviment d'aquesta o aquella part del sistema s'anomena grau de llibertat, i com més graus de llibertat tingui l'actuador, més gran serà la mobilitat de la màquina, robot o actuador.
Segons el tipus d'accionament, s'aconsegueix una implementació més o menys qualitativa de la interacció de les parts de la màquina entre si, així com l'eficiència i flexibilitat del seu funcionament. L'elecció del tipus d'actuador és una tasca difícil que els enginyers i tecnòlegs en robòtica decideixen en l'etapa de disseny del sistema.
Un dels tipus d'unitats més populars utilitzats en sistemes mecatrònics — actuador pneumàtic… Aquí s'utilitza el gas com a mitjà de treball, normalment aire comprimit, l'energia del qual impulsa el mecanisme. És per això que els actuadors pneumàtics són econòmics, fiables, fàcils de configurar i operar i segurs contra incendis.No hi ha cap cost per comprar i eliminar el fluid de treball (aire).
No obstant això, hi ha alguns inconvenients, per exemple, una possible reducció de la pressió de treball per fuites a causa de la mala estanquitat de les canonades, que comporta pèrdues de potència i velocitat, així com complicacions en el posicionament. No obstant això, els motors pneumàtics, els cilindres pneumàtics i els motors pneumàtics pneumàtics s'utilitzen àmpliament avui en dia en robots i màquines mòbils.
Vegem un dispositiu típic accionament pneumàtic… L'accionament pneumàtic com a tal inclou necessàriament un compressor i un motor d'aire. En aquesta combinació, el sistema pot convertir les característiques mecàniques de l'accionament segons els requisits de càrrega.
Els actuadors pneumàtics de moviment de translació són de dues posicions, quan el moviment del cos de treball es realitza entre dues posicions finals, així com de múltiples posicions, quan el moviment es realitza en diferents posicions.
Segons el principi de funcionament, els actuadors pneumàtics poden ser de simple efecte (quan la molla proporciona retorn a la posició inicial) o de doble efecte (el retorn, com el moviment de treball, es produeix per aire comprimit). Els actuadors lineals pneumàtics es divideixen principalment en dos tipus: pistó i diafragma.
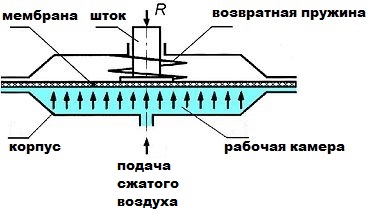
En un actuador de pistó pneumàtic, el pistó es mou en el cilindre sota l'acció de l'aire comprimit o una molla (la carrera de retorn d'un actuador d'efecte simple la proporciona una molla).En un actuador pneumàtic de diafragma, una cambra dividida per un diafragma en dues cavitats té per un costat aire comprimit que pressiona el diafragma, i per l'altre costat, una vareta s'uneix al diafragma i rep una força longitudinal del diafragma. Així, l'actuador pneumàtic s'utilitza amb èxit en sistemes de control cíclic, per exemple en manipuladors amb moviment horitzontal de tija.
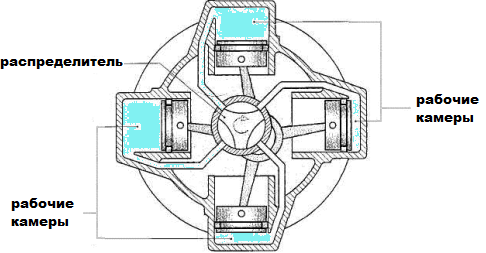
Funcionalment, l'actuador pneumàtic es pot dividir en quatre unitats: la unitat de preparació d'aire, la unitat de distribució d'aire comprimit, el motor de l'actuador i el sistema de transmissió d'aire comprimit als actuadors.
A la unitat d'aire condicionat, l'aire s'asseca i es neteja de pols. Segons el programa, el bloc de distribució obre o tanca (amb l'ajuda de vàlvules) el subministrament d'aire comprimit a la cavitat dels motors d'accionament.
Les vàlvules solen ser accionades per electroimants o també pneumàticament (si l'entorn és explosiu). El bloc del motor executiu és en realitat cilindres amb pistons que giren o es mouen en línia recta: cilindres pneumàtics que difereixen en desplaçaments, forces i velocitats determinats.
Cada motor té el seu propi cicle de treball, i la seqüència de cicles està estrictament determinada pel procés tecnològic i controlada pel programa corresponent. sistemes de control de robots… El sistema de transmissió d'aire comprimit a diferents aparells utilitza accionaments pneumàtics de diferents seccions, segons la tasca a realitzar.
En principi, la transmissió i conversió d'energia en un accionament pneumàtic té aquest aspecte.El motor principal impulsa el compressor, que comprimeix l'aire. A continuació, l'aire comprimit s'alimenta a través de l'equip de control al motor pneumàtic, on la seva energia es converteix en energia mecànica (moviment del pistó, biela). Després d'això, el gas de treball es descarrega al medi ambient, és a dir, no torna al compressor.
Els avantatges dels accionaments pneumàtics difícilment es poden exagerar. En comparació amb els líquids, l'aire és més compressible, menys dens i viscós, més líquid. La viscositat de l'aire augmenta amb la pressió i la temperatura.
Però com que l'aire sempre conté una petita quantitat de vapor d'aigua i no té propietats lubricants, hi ha el risc d'un efecte nociu de la condensació a les superfícies de treball de les cambres. Per tant, els accionaments pneumàtics necessiten condicionament, és a dir, se'ls ofereix aquestes propietats per avançat per allargar la vida útil de l'accionament en el qual s'utilitza com a entorn de treball.