El procediment per preparar i compilar programes per a controladors programables
Les funcions de control de l'equip estan determinades per la tecnologia i l'organització del procés. Per tant, en general, són força específics i individuals per a cada unitat o lloc. Tanmateix, quan es planteja i resol el problema del desenvolupament de programari eficient, mòbil i flexible per a sistemes d'automatització, les funcions de control complexes solen representar-se com un conjunt d'accions elementals simples com ara "habilitar", "desactivar", "retard d'implementació", etc. .
A partir d'aquestes posicions, la majoria de les funcions de control es poden reduir condicionalment a dues, que són força habituals per a qualsevol tasca: lògica i reglamentària. El primer es coneix com a algorisme d'acció temporal general i el segon es coneix com a paràmetre de temps. La presentació més general d'aquestes funcions típiques per al control d'equips tecnològics es mostra a la fig. 1, a i b.
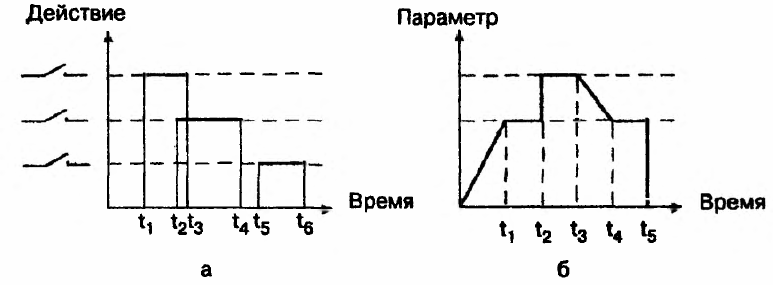
Arròs. 1. Funcions de control típiques dels equips de procés
A partir de l'anàlisi de les característiques quantitatives de les funcions de control implementades en cada exemple específic d'equips tecnològics, es poden formular requisits tècnics. a un controlador lògic programable (PLC) com a mitjà de control en termes de precisió, velocitat, nombre de tasques paral·leles a resoldre, quantitat de memòria, composició d'equips perifèrics, eines de diàleg, etc.
L'estàndard IEC 61131-3 descriu 5 llenguatges de programació fruit de la recerca dels desenvolupaments propietaris més reeixits dels líders mundials en el mercat de PLC:
-
el llenguatge dels circuits de contacte de relé (RKS) o diagrames d'escala LD (diagrama d'escala),
-
Llenguatge de diagrama de blocs de funció (FBD), FBD (diagrama de blocs de funció),
-
Llenguatge IL (llista d'instruccions): assemblador típic amb transicions d'acumulador i etiqueta,
-
El llenguatge ST (Structured Text) és un llenguatge de text d'alt nivell,
-
Gràfics SFC (Sequential Function Chart). SFC deu els seus orígens a les xarxes de Petri.
Els llenguatges PLC són molt originals i difereixen significativament dels coneguts llenguatges de programació informàtica.
L'estàndard no obliga els desenvolupadors de PLC a implementar tots els llenguatges de programació. Normalment, els petits fabricants de PLC implementen múltiples o un sol llenguatge. En molts aspectes, la prioritat d'utilitzar un llenguatge de programació particular depèn de les tradicions establertes històricament de la indústria o l'àrea d'aplicació.
L'estandardització dels llenguatges de programació i el model PLC va comportar l'aparició d'empreses especialitzades dedicades al disseny de sistemes de programació per a PLC, que proporcionen la transició d'un llenguatge de programació a un llenguatge màquina a diversos nivells:
-
en entrar en un programa;
-
en renderitzar;
-
en canviar o moure una ordre o una àrea de programa independent;
-
quan es detecten errors de sintaxi i s'envien senyals a l'operador.
Per realitzar aquestes tasques, el sistema de programació pot funcionar amb èxit en mode local, és a dir, independentment del controlador. Això dóna al programador l'oportunitat d'escriure un programa des de qualsevol lloc convenient, i no en un taller de producció, és a dir, en un entorn més favorable al procés creatiu. La possibilitat de modelatge facilita molt el procés de depuració del programa i millora l'organització del treball.

Les principals etapes de preparació i programació dels controladors programables són les següents:
1. Determinar què ha de fer el sistema controlat (objecte de control), els objectius de control i altres funcions addicionals que realitza el sistema de control, la seqüència d'operacions que realitzen els actuadors respecte al temps i l'estat dels sensors i dispositius de control.
2. Redacta l'algorisme del programa en forma gràfica.
3. Determineu quins mòduls es necessiten per connectar sensors, dispositius de control, actuadors, alarmes i altres equips necessaris per gestionar el lloc.
A l'hora d'escollir mòduls, analitzeu els paràmetres dels senyals d'entrada/sortida (nivells de tensió i corrent) i la funcionalitat dels mòduls. Preste atenció a la possibilitat d'ús mòduls intel·ligents, que pot realitzar el preprocessament dels senyals d'entrada i algunes funcions de control local, que reduirà molt la complexitat de la programació.
4.Feu un diagrama o una taula per connectar tots els dispositius d'entrada i sortida de l'objecte de control i l'equip utilitzat en el procés de control als mòduls del controlador.
5. Escriure un programa en un dels llenguatges de programació PLC que realitzi una determinada seqüència d'operacions, la seva interconnexió i desenvolupi possibles situacions d'emergència.
6. Comproveu si hi ha errors de sintaxi al programa i corregiu-los, i després si hi ha errors en temps d'execució i també feu les correccions adequades.
7. Escriu el programa i tots els paràmetres de funcionament necessaris al controlador.
8. Un cop el sistema de control estigui completament muntat, comproveu el programa en el procés de control real i, si cal, feu una configuració més precisa.
9. Deseu dues còpies de l'últim programa i deseu-les en llocs diferents.