Què és la mecatrònica, elements mecatrònics, mòduls, màquines i sistemes
La paraula "mecatrònica" està formada per dues paraules: "mecànica" i "electrònica". Aquest terme va ser proposat el 1969 per un desenvolupador sènior de Yaskawa Electric, un japonès anomenat Tetsuro Mori. Al segle XX, Yaskawa Electric es va especialitzar en el desenvolupament i millora d'accionaments elèctrics i motors de corrent continu i, per tant, va aconseguir un gran èxit en aquesta direcció, per exemple, s'hi va desenvolupar el primer motor de corrent continu d'induït de disc.
Això va ser seguit per desenvolupaments pel que fa als primers sistemes CNC de maquinari. I l'any 1972, aquí es va registrar la marca Mechatronics. La companyia aviat va fer grans avenços en el desenvolupament de tecnologies d'accionament elèctric. Més tard, la companyia va decidir abandonar la paraula "Mecatrònica" com a marca registrada, ja que el terme s'utilitzava àmpliament tant al Japó com a tot el món.

En qualsevol cas, el Japó és la llar del desenvolupament més actiu d'aquest enfocament en tecnologia, quan es va fer necessari combinar elements mecànics, màquines elèctriques, electrònica de potència, microprocessadors i programari per implementar un control d'accionament elèctric d'alta precisió.
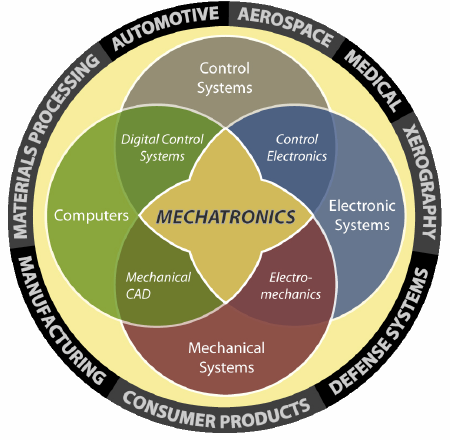
Un símbol gràfic comú per a la mecatrònica és un diagrama del lloc web de RPI (Rensselaer Polytechnic Institute, NY, EUA):
La mecatrònica és un dels camps de l'enginyeria més nous del món, que, segons la UNESCO, és un dels deu més prometedors i buscats.
En termes generals, es pot donar al terme "mecatrònica" la següent definició: és un camp de la ciència i la tecnologia basat en una combinació sistemàtica d'unitats per a la mecànica de precisió, l'enginyeria elèctrica, l'electrònica, la tecnologia de microprocessadors, diverses fonts d'energia, elèctriques, hidràuliques i els accionaments pneumàtics, així com el seu control intel·ligent, es van centrar en la creació i funcionament de blocs de moderns sistemes de producció automatitzats.
La mecatrònica és un control de moviment informatitzat.
L'objectiu de la mecatrònica és crear mòduls de moviment qualitativament nous, mòduls de moviment mecatrònics, mòduls mecatrònics intel·ligents i, sobre la seva base, màquines i sistemes intel·ligents en moviment.
Històricament, la mecatrònica va evolucionar a partir de l'electromecànica i, basant-se en els seus èxits, va anar més enllà combinant sistemàticament sistemes electromecànics amb dispositius de control informàtic, sensors integrats i interfícies.

Esquema del sistema mecatrònic
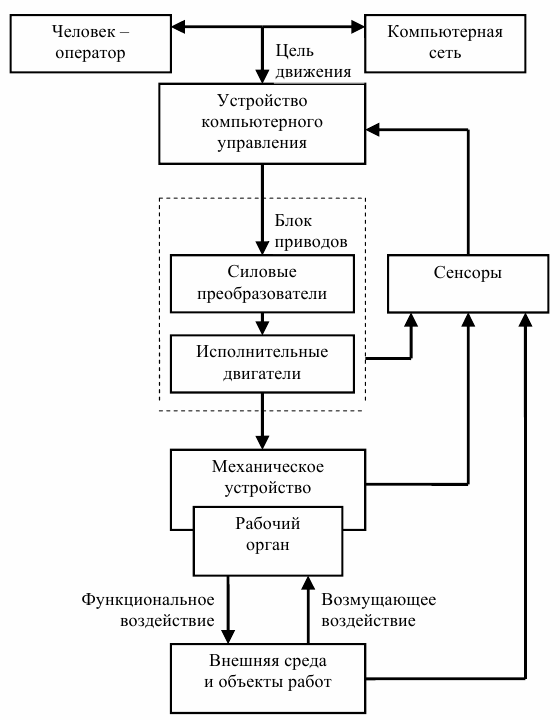
Estructura generalitzada dels sistemes mecatrònics
Els elements electrònics, digitals, mecànics, elèctrics, hidràulics, pneumàtics i d'informació — poden formar part del sistema mecatrònic, ja que inicialment elements de naturalesa física diferent, però, s'ajunten per obtenir un resultat qualitativament nou del sistema, que no es pot aconseguir. per cada element com per un intèrpret independent.

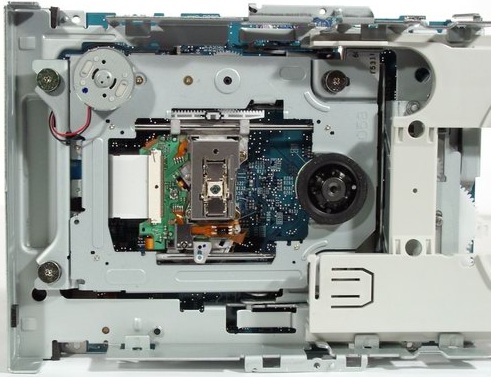
Un motor d'eix independent no podrà expulsar la safata del reproductor de DVD per si mateix, però sota el control d'un circuit amb programari de microcontrolador i connectat correctament a un engranatge de cuc, tot funcionarà fàcilment i semblarà un simple sistema monolític. No obstant això, malgrat la senzillesa externa, un sistema mecatrònic per definició inclou diverses unitats i mòduls mecatrònics interconnectats i que interactuen entre si per realitzar accions funcionals específiques per resoldre una tasca concreta.
Un mòdul mecatrònic és un producte independent (estructuralment i funcionalment) dissenyat per realitzar moviments amb interpenetració i integració simultània de maquinari i programari amb finalitats dels seus components.
Un sistema mecatrònic típic consisteix en components electromecànics i de potència interconnectats que al seu torn són controlats per un ordinador o microcontroladors.
A l'hora de dissenyar i construir un sistema mecatrònic d'aquest tipus, intenten evitar nodes i interfícies innecessàries, intenten que tot sigui concís i el més fluid possible, no només per millorar les característiques de mida massiva del dispositiu, sinó també per augmentar la fiabilitat. del sistema en general.
De vegades no és fàcil per als enginyers, es veuen obligats a trobar solucions molt inusuals precisament pel fet que diferents unitats es troben en diferents condicions de treball, fent coses completament diferents. Per exemple, en alguns llocs, un coixinet convencional no funcionarà i es substitueix per una suspensió electromagnètica (això es fa, en particular, a les turbines que bombegen gas a través de canonades, ja que un coixinet convencional fallaria ràpidament a causa de la penetració de gas a l'interior). el seu lubricant).
D'una manera o altra, avui la mecatrònica ha impregnat tot, des d'electrodomèstics fins a robòtica de construcció, armes i aeroespacial. Totes les màquines CNC, discs durs, panys elèctrics, el sistema ABS del teu cotxe, etc. — a tot arreu, la mecatrònica no només és útil, sinó també necessària. Ara és rar on es pot trobar el control manual, tot es redueix al fet que heu premut el botó sense fixació o simplement heu tocat el sensor, heu obtingut el resultat, aquest és potser l'exemple més primitiu del que és la mecatrònica actual.
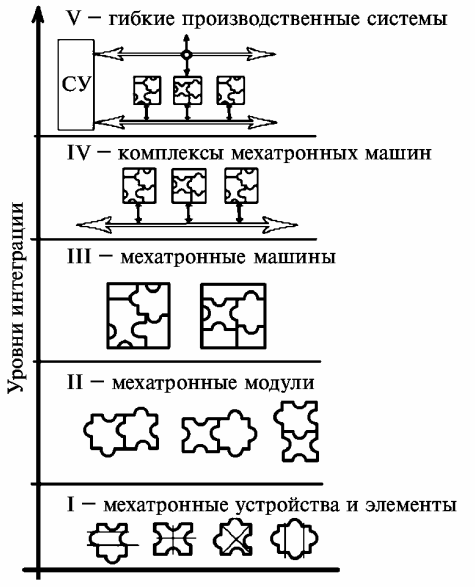
Diagrama de jerarquia dels nivells d'integració en mecatrònica
El primer nivell d'integració el formen els dispositius mecatrònics i els seus elements. El segon nivell d'integració el formen els mòduls mecatrònics integrats. El tercer nivell d'integració està format per les màquines mecatròniques d'integració. El quart nivell d'integració el formen els complexos de màquines mecatròniques. El cinquè nivell d'integració es configura en una única plataforma d'integració de complexos de màquines mecatròniques i robots, que impliquen la formació de sistemes de producció flexibles reconfigurables.
Avui en dia, els mòduls i sistemes mecatrònics s'utilitzen àmpliament en les àrees següents:
-
equips d'enginyeria mecànica i d'automatització, processos tecnològics en enginyeria mecànica;
-
robòtica industrial i especial;
-
tecnologia de l'aviació i l'espai;
-
equipament militar, vehicles per a la policia i serveis especials;
-
equips d'enginyeria electrònica i prototipat ràpid;
-
indústria de l'automoció (mòduls de tracció a motor, frens antibloqueig, transmissions automàtiques, sistemes d'aparcament automàtic);
-
vehicles no tradicionals (cotxes elèctrics, bicicletes elèctriques, cadires de rodes);
-
equip d'oficina (per exemple, fotocopiadores i màquines de fax);
-
perifèrics d'ordinador (per exemple, impressores, traçadors, unitats de CD-ROM);
-
equipament mèdic i esportiu (pròtesis bioelèctriques i exoesquelets per a discapacitats, entrenadors tonificants, càpsules de diagnòstic controlat, massatges, etc.);
-
electrodomèstics (rentat, costura, rentavaixelles, aspiradores independents);
-
micromàquines (per a medicina, biotecnologia, comunicacions i telecomunicacions);
-
aparells i màquines de control i mesura;
-
equips d'ascensors i magatzems, portes automàtiques en hotels i aeroports; equips fotogràfics i de vídeo (reproductors de videodiscs, dispositius d'enfocament de càmeres de vídeo);
-
simuladors per a la formació d'operadors de sistemes tècnics complexos i pilots;
-
transport ferroviari (sistemes de control i estabilització de trens);
-
màquines intel·ligents per a la indústria alimentària, càrnia i làctia;
-
màquines d'impressió;
-
dispositius intel·ligents per a la indústria de l'espectacle, atraccions.
En conseqüència, augmenta la necessitat de personal amb tecnologies mecatròniques.