Característiques dels motors d'inducció monofàsics
Els motors asíncrons monofàsics s'utilitzen àmpliament en tecnologia i vida quotidiana. La producció de motors elèctrics asíncrons monofàsics d'una fracció d'un watt a centenars de watts és més de la meitat de la producció de totes les màquines de baixa potència i la seva potència augmenta constantment.
Els motors monofàsics es divideixen generalment en dues categories:
-
motors d'ús general «que inclouen motors elèctrics industrials i domèstics;
-
motors d'aparells automàtics: motors de corrent altern controlats i no controlats i màquines elèctriques especialitzades de baixa potència (tacogeneradors, transformadors rotatius, selsins, etc.).
Una proporció significativa de motors elèctrics asíncrons són motors de propòsit general dissenyats per funcionar en una xarxa de CA monofàsica. Tanmateix, hi ha un grup força extens de motors elèctrics asíncrons universals dissenyats per funcionar tant en xarxes monofàsiques com trifàsiques.
El disseny dels motors universals pràcticament no difereix disseny tradicional de màquines asíncrones trifàsiques… Quan funcionen en una xarxa trifàsica, aquests motors tenen característiques similars a les dels motors trifàsics.
Els motors monofàsics tenen un rotor de gàbia d'esquirol i el bobinatge de l'estator es pot fabricar en diferents versions. Molt sovint, un bobinatge de treball que omple dos terços de les ranures i un bobinatge inicial que omple el terç restant de les ranures es col·loquen a l'estator. La bobina en funcionament es calcula per a un funcionament continu i la bobina d'arrencada només es calcula per al període d'inici. Per tant, està fet de filferro amb una petita secció transversal i conté un nombre important de voltes. Per crear un parell d'arrencada, el bobinatge d'arrencada inclou elements de canvi de fase: resistències o condensadors.
Els motors asíncrons de baixa potència poden ser bifàsics quan el bobinat de treball col·locat a l'estator té dues fases barrejades a l'espai a 90 °. En una de les fases, s'inclou constantment un element de desplaçament de fase: un condensador o una resistència Top, que proporciona un cert canvi de fase entre els corrents de la bobina.
Se sol anomenar motor amb un condensador connectat permanentment a una de les fases condensador... La capacitat del condensador de canvi de fase pot ser constant, però en alguns casos el valor de la capacitat pot ser diferent per a l'arrencada i per al mode d'execució.
Una característica dels motors asíncrons monofàsics és la capacitat de girar el rotor en diferents direccions. El sentit de gir ve determinat per la direcció del parell inicial.
A baixa resistència del rotor (Ccr < 1), per tant, un motor monofàsic no pot funcionar en mode invers. El mode del motor correspon a les revolucions del rotor 0 <n <nc a una velocitat més alta es produeix el mode del generador.
Una característica dels motors monofàsics és que el seu parell màxim depèn de la resistència del rotor. A mesura que augmenta la resistència activa del rotor, el parell màxim disminueix i amb valors de resistència grans Skr > 1 es torna negatiu.
A l'hora d'escollir el tipus de motor elèctric per accionar un dispositiu o mecanisme, cal conèixer-ne les característiques, les principals són les característiques del parell (parell inicial d'arrencada, parell màxim, parell mínim), freqüència de gir, característiques vibroacústiques. En alguns casos, també es requereixen característiques d'energia i pes.
Com a exemple, les característiques d'un motor monofàsic es calculen amb els paràmetres següents:
-
nombre de fases - 1;
-
freqüència de xarxa — 50 Hz;
-
tensió de xarxa - 220 V;
-
resistència activa del bobinatge de l'estator - 5 ohms;
-
resistència inductiva del bobinatge de l'estator - 9,42 ohms;
-
resistència inductiva del bobinatge del rotor - 5,6 ohms;
-
longitud axial de la màquina - 0,1 m;
-
el nombre de voltes al bobinatge de l'estator -320;
-
radi del forat de l'estator - 0,0382 m;
-
nombre de canals - 48;
-
espai d'aire — 1,0 x 103 m.
-
factor d'inductància del rotor 1,036.
El bobinatge monofàsic omple dos terços de les ranures de l'estator.
A la fig. La figura 1 mostra les dependències del corrent d'un motor elèctric monofàsic i el parell de lliscament electromagnètic. En el mode inactiu ideal, el corrent del motor consumit per la xarxa, principalment per crear un camp magnètic, té un valor relativament gran.
Per a un motor simulat, la magnitud del corrent de magnetització és d'uns 30% del corrent inicial, per a motors trifàsics amb la mateixa potència - 10-15%.El moment electromagnètic en el mode inactiu ideal té un valor negatiu, que augmenta a mesura que augmenta la resistència del circuit del rotor. A les relliscant C= 1, el moment electromagnètic és zero, la qual cosa confirma el correcte funcionament del model.
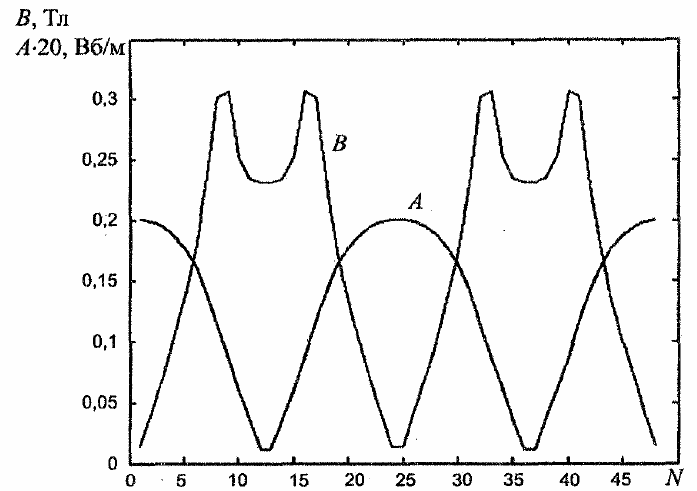
Fig. 1. Els embolcalls de potencial vectorial i inducció magnètica a la bretxa del motor durant el lliscament s = 1
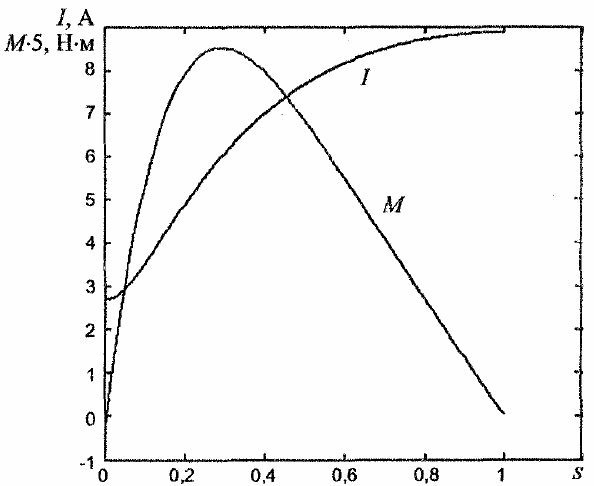
Arròs. 2. Dependència del corrent i el parell electromagnètic d'un motor asíncron monofàsic al lliscament
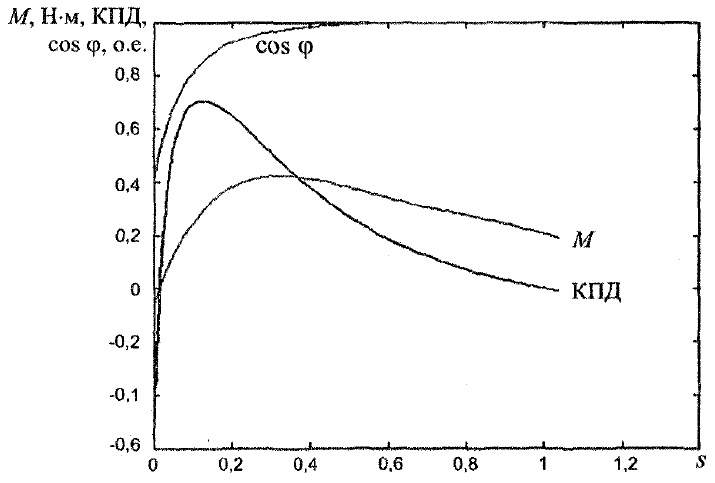
Les dependències de la potència útil i consumida al lliscament (Fig. 3) tenen un caràcter tradicional. L'eficiència del motor en el mode de ralentí ideal té un signe negatiu corresponent al parell negatiu i el factor de potència en aquest mode és molt baix (0,125 per al motor simulat).
El valor més baix del factor de potència en comparació amb els motors trifàsics s'explica per l'alta magnitud del corrent de magnetització. A mesura que augmenta la càrrega, el valor del factor de potència augmenta i esdevé comparable al dels motors trifàsics (Fig. 4).
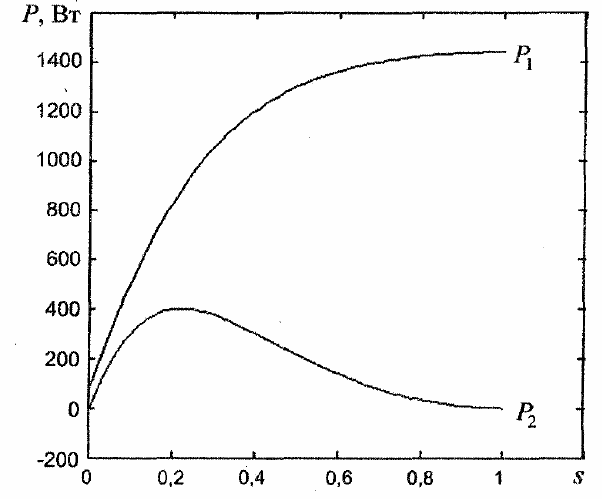
Arròs. 3. Dependència de la potència útil i consumida d'un motor asíncron monofàsic del lliscament
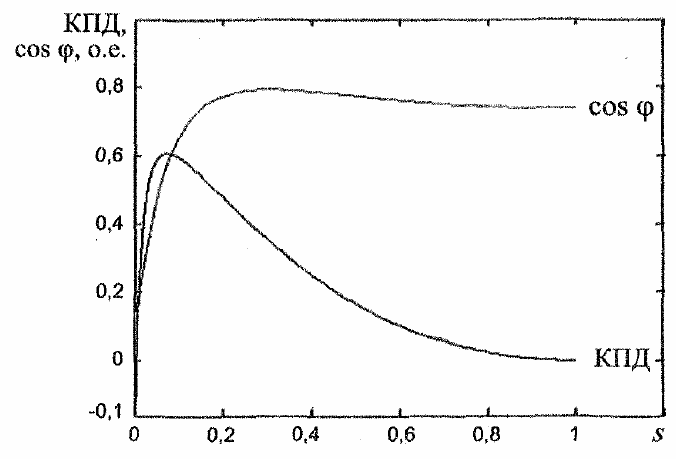
Arròs. 4. Dependència del coeficient d'acció útil i de potència d'un motor asíncron monofàsic en lliscament
A mesura que augmenta la resistència activa del rotor, la magnitud del moment electromagnètic disminueix i, en lliscaments crítics per sobre de la unitat, esdevé negatiu.
A la fig. La figura 5 mostra la dependència del moment electromagnètic d'un motor de lliscament monofàsic per a diferents valors de la conductivitat elèctrica del medi secundari del motor.
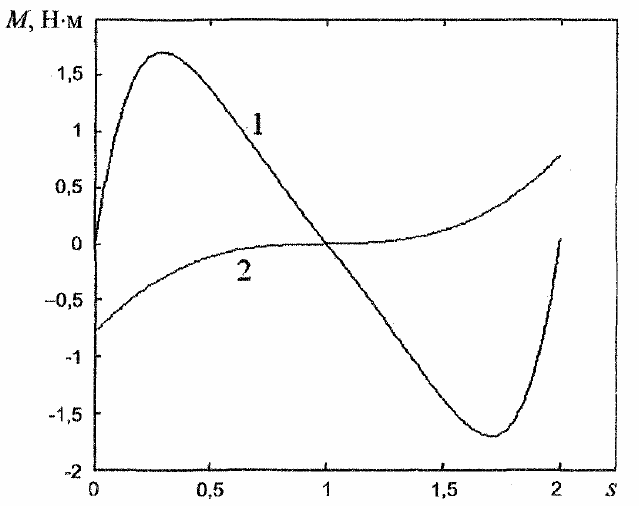
Arròs. 5.Dependència del moment electromagnètic d'un motor de lliscament monofàsic a diferents resistències del rotor (1 — 17 x 106 cm / m, 2 — 1,7 x 106 cm / m)
Els motors de condensadors tenen dos bobinatges connectats permanentment a la xarxa. Un d'ells està connectat directament a la xarxa, el segon està connectat en sèrie amb un condensador que proporciona el canvi de fase necessari.
Ambdós bobinatges ocupen el mateix nombre de ranures a l'estator, i el nombre de les seves espires i la capacitat del condensador es calculen de tal manera que amb algun lliscament es proporciona un camp magnètic giratori circular. Molt sovint, el lliscament nominal s'accepta com a tal. En aquest cas, però, el parell inicial resulta ser molt més petit que el nominal.
El camp magnètic en el mode inicial és el·líptic; la influència dels components contraris al moviment del camp magnètic es veu molt afectada.Si s'augmenta la capacitat del condensador seleccionant-la a partir de la condició d'obtenir un camp circular a l'inici, hi ha una disminució del parell i un Disminució dels indicadors energètics en lliscament nominal.
També és possible una tercera variant, quan el camp circular correspon a un lliscament de major magnitud que en el mode nominal. Però aquest camí tampoc és òptim, ja que l'augment del parell va acompanyat d'un augment significatiu de les pèrdues. Es pot aconseguir un augment del parell d'arrencada d'un motor de condensador augmentant la resistència activa del rotor. Aquest mètode comporta un augment de les pèrdues amb cada lliscament, com a conseqüència de la qual cosa l'eficiència del motor disminueix.
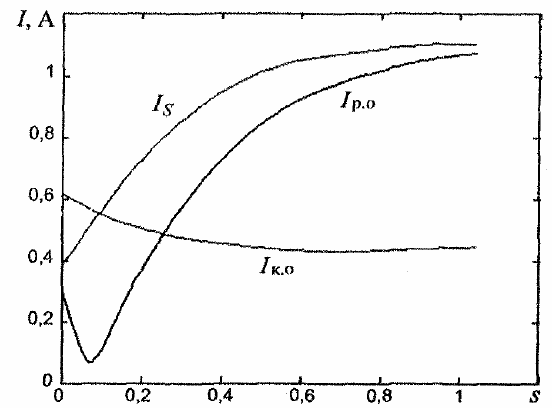
Arròs. 6.Dependència dels corrents del motor del condensador de lliscament (Azp.o - corrent de la bobina de funcionament, Azk.o - corrent de la bobina del condensador, E - corrent del motor)
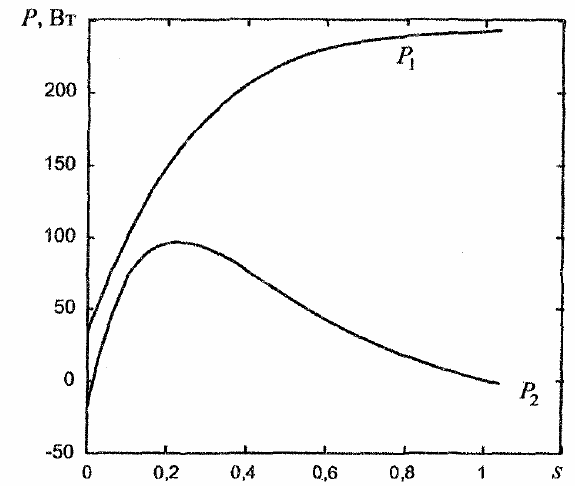
Arròs. 7. Dependència de la potència de lliscament P1 consumida i P2 útil d'un condensador
Arròs. 8. Dependència del coeficient d'acció i potència útils i del moment electromagnètic del motor del condensador de lliscament
El motor del condensador té un rendiment energètic bastant satisfactori, un factor de potència elevat, el valor del qual supera el factor de potència d'un motor trifàsic i, amb una resistència del rotor augmentada i una capacitat significativa, un parell d'arrencada elevat. Al mateix temps, com s'ha esmentat anteriorment, el motor té un valor d'eficiència reduït.
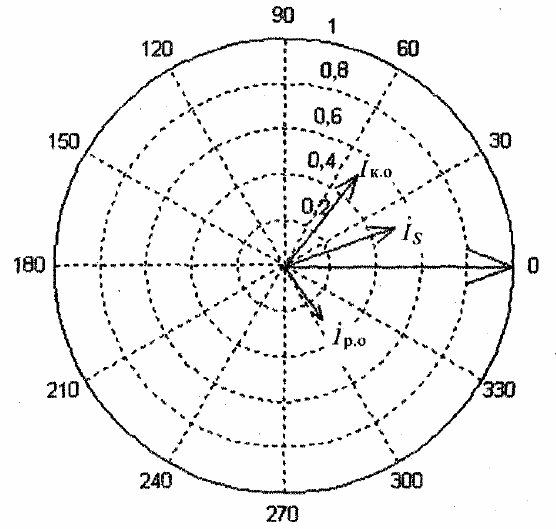
Arròs. 9. Diagrama vectorial d'un motor de condensador amb lliscament s = 0,1
El diagrama vectorial (Fig. 9) mostra que al valor seleccionat de la capacitat del condensador, el corrent de la bobina del condensador s'avança en relació a la tensió de la xarxa i el corrent de la bobina de treball està endarrerit. El diagrama també mostra que quan es llisca prop del nominal, el camp magnètic del motor és el·líptic. Per obtenir un camp circular, cal reduir el valor de la capacitat del condensador de manera que els corrents a les dues bobines siguin iguals en magnitud.
Veure també sobre aquest tema:Motors de condensadors monofàsics de múltiples velocitats