Què és un transformador diferencial lineal
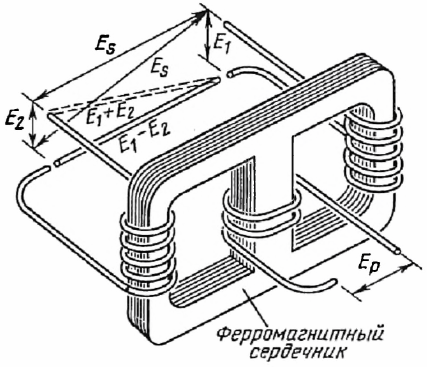
Es pot utilitzar un corrent altern que flueix en una bobina primària per induir una tensió alterna en dues bobines secundàries. Si els dos bobinatges secundaris són idèntics en les seves característiques i els dos camins de les línies de camp magnètic que passen per aquestes bobines també són idèntics, aleshores les dues tensions secundàries generades seran iguals. Un dispositiu amb aquesta estructura s'anomena transformador diferencial.

Un transformador diferencial pot tenir un nucli d'aire o un nucli magnètic.
Es poden connectar dos bobinatges secundaris ja sigui en fase o antifàsica, en el primer cas les seves tensions s'afegeixen entre si i en el segon cas es resta un de l'altre.
Un bobinatge primari s'utilitza per conduir dos bobinatges secundaris simètrics, el darrer dels quals es pot connectar de manera que les tensions secundàries s'agreguen o es resten entre si.
Si es connecten dues bobines d'acord amb un esquema de resta, aleshores als mateixos valors de les seves tensions, la tensió secundària total serà zero.Si les característiques del circuit magnètic d'una d'aquestes bobines es modifiquen intencionadament en comparació amb les característiques del circuit magnètic de l'altra bobina, aleshores les dues tensions secundàries diferiran i la seva diferència no serà zero.
En aquestes condicions, la fase de la tensió secundària total indica quina trajectòria de les línies de camp magnètic té la major resistència, mentre que l'amplitud d'aquesta tensió reflecteix el valor de la diferència de reluctància.
Si s'utilitza la mateixa acció per augmentar la resistència magnètica d'un camí i per disminuir la resistència magnètica de l'altre camí, aleshores la tensió de sortida que reflecteix aquesta acció assoleix el seu valor màxim i la funció de transferència tindrà la major linealitat possible.
Com que no es poden fer dos bobinatges secundaris ni dos camins de línies de camp magnètic exactament iguals, un transformador diferencial sempre té una tensió de sortida definida, fins i tot amb un senyal útil zero a l'entrada.
A més, les característiques dels circuits magnètics no són lineals. Com a resultat d'aquesta no linealitat, apareixen fins i tot components harmònics de la freqüència fonamental de la tensió d'excitació primària aplicada, que no es poden compensar completament en cap disposició dels bobinatges secundaris.
La reticència d'un circuit ferromagnètic d'espai d'aire és una funció de l'amplada de l'espai amb una forta no linealitat. Com a resultat, la inductància d'una bobina enrotllada al voltant d'aquest circuit també és una funció no lineal de l'amplada del buit.
Al mateix temps, si hi ha dos camins més o menys idèntics de les línies de camp magnètic, cadascuna amb un espai d'aire, i si l'amplada d'un buit augmenta a mesura que l'amplada de l'altre disminueix, llavors la diferència de resistència magnètica d'aquests els camins poden variar prou linealment.
Els principis bàsics del transformador diferencial es concreten a la pràctica en una varietat de configuracions de disseny específiques per a molts propòsits diferents.
Transformador diferencial lineal variable (LVDT) és un transductor passiu (sensor) que funciona segons el principi d'inducció mútua i que es pot utilitzar per mesurar el desplaçament, la tensió, la pressió i el pes.
La majoria de vegades que utilitzen NS es poden utilitzar per mesurar el desplaçament en el rang de diversos mil·límetres a centímetres, convertint directament el desplaçament en un senyal elèctric.
La inductància de la bobina a prop o dins de la qual es troba la vareta ferromagnètica és una funció de la coordenada de la posició d'aquesta vareta respecte a la bobina amb una forta no linealitat.
Si aquesta vareta és un circuit ferromagnètic d'algun transformador diferencial, la tensió diferencial secundària pot servir com a indicador del desplaçament de la vareta, depenent de manera prou lineal d'aquest desplaçament.
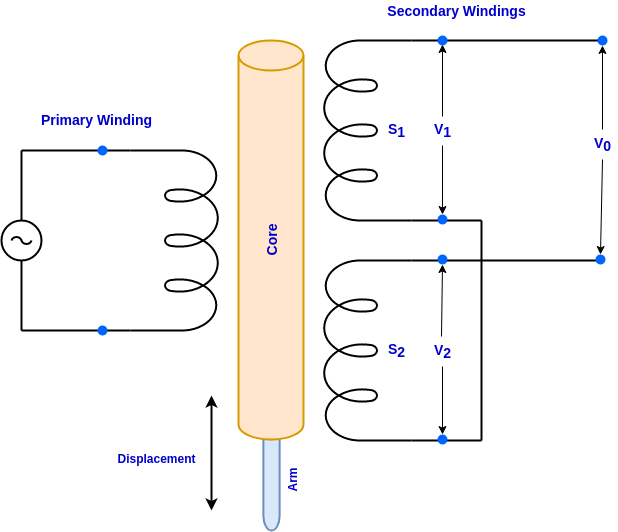
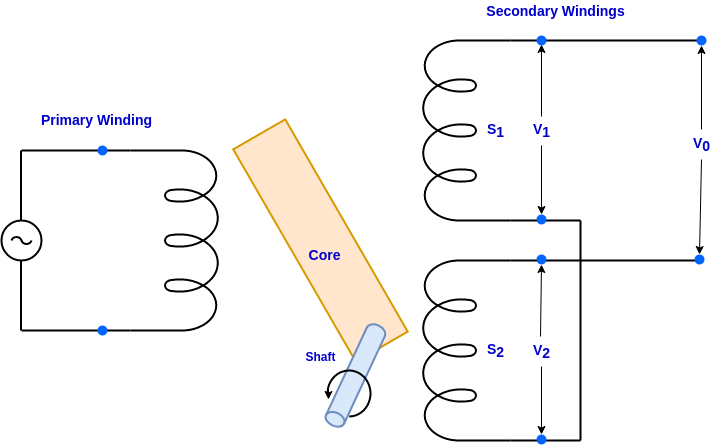
El bobinatge primari està connectat a una font de CA. Els dos bobinatges secundaris S1 i S2 tenen el mateix nombre de voltes i estan muntats en sèrie enfront de l'altre.
Així, l'EMF induït en aquests bobinatges està 180 ° desfasat entre si i, per tant, l'efecte global s'anul·la.

La posició del nucli ferromagnètic simètric proporcionat en el disseny del transformador diferencial es pot determinar a partir de la fase i l'amplitud de la tensió secundària.
La diferència absoluta entre les dues tensions secundàries indica el valor absolut del desplaçament de la vareta respecte a la posició central o zero, i la fase d'aquesta diferent tensió indica la direcció del desplaçament.
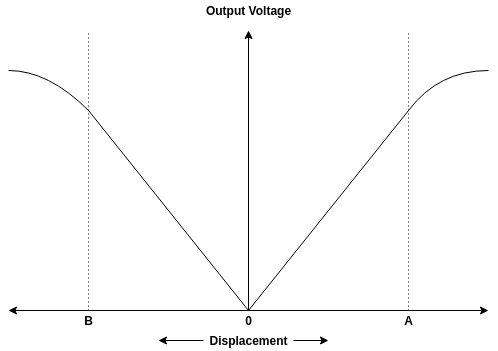
La corba B/I d'un transformador diferencial variable lineal es mostra a la figura.
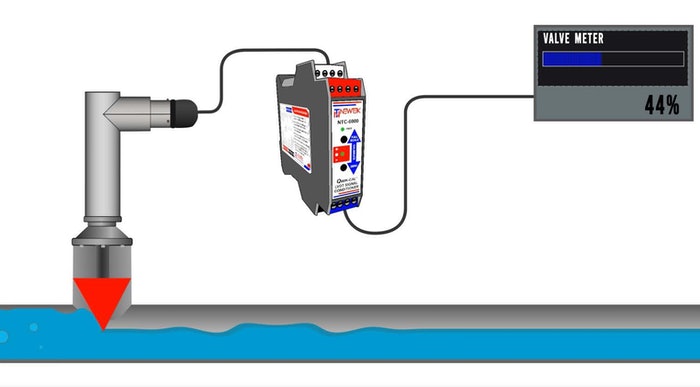
Un exemple d'ús d'un transformador diferencial lineal per proporcionar una retroalimentació precisa de la posició per al control i el control de vàlvules en plantes químiques, centrals elèctriques i equips agrícoles:
Sensors de desplaçament submergibles LVDT D5W:
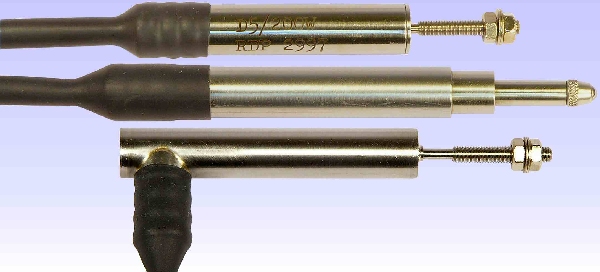
Aquests transductors estan dissenyats per mesurar el desplaçament i la posició. Proporcionen una mesura precisa de la posició de l'induït (part lliscant) respecte a la carcassa del sensor de desplaçament.
Els transductors de desplaçament submergibles estan dissenyats per prendre mesures mentre estan immersos en líquids adequats. Els líquids no magnètics poden inundar el tub de l'induït sense afectar el funcionament del convertidor. Aquests convertidors estan disponibles en versions no controlades o de retorn per molla.
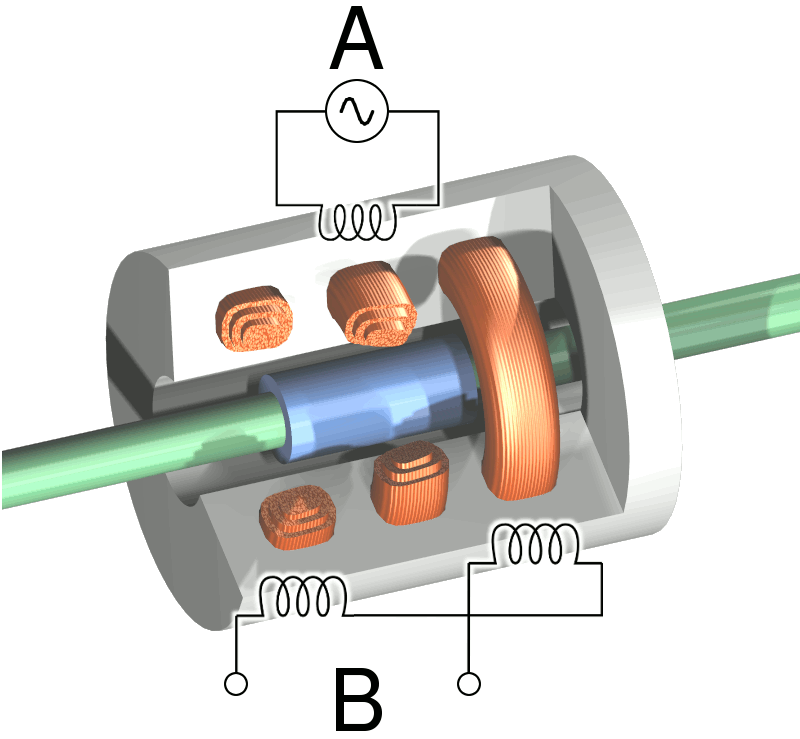
En automatitzar diversos processos tecnològics, sovint s'utilitzen convertidors bilaterals amb un transformador diferencial amb un nucli ferromagnètic, que s'insereix als seus extrems a distàncies iguals a les dues bobines secundàries.
A mesura que la vareta es mou axialment, s'endinsa més en una d'aquestes bobines i s'estén des de l'altra.La diferència absoluta entre les dues tensions secundàries indica el valor absolut del desplaçament de la vareta respecte a la posició central o zero, i la fase d'aquesta diferent tensió indica la direcció del desplaçament.
Transformador diferencial rotatiu de CA:
Un transformador diferencial variable rotatiu és un transformador passiu basat en el principi d'inducció mútua. S'utilitza per mesurar el desplaçament angular.
El seu disseny és similar al d'un transformador diferencial variable lineal excepte per a la construcció del nucli.
El bobinatge primari està connectat a una font de CA. Els dos bobinatges secundaris S1 i S2 tenen el mateix nombre de voltes i estan muntats en sèrie enfront de l'altre.
Avantatges del transformador diferencial lineal:
-
No hi ha contacte físic entre el nucli i les bobines;
- Alta fiabilitat;
-
Resposta ràpida;
-
Llarga vida útil.
És el sensor inductiu més utilitzat per la seva alta precisió.