La selecció d'un motor elèctric asíncron per al funcionament en el mode de frenada dinàmica per autoexcitació
 Motor elèctric asíncron amb un rotor bobinat amb l'esquema de control més senzill: la inclusió de resistència al circuit del rotor té propietats de control extremadament baixes. Per tant, abans de la disponibilitat de convertidors de freqüència al mercat, es van desenvolupar diversos esquemes per obtenir una velocitat reduïda en mode de baixada.
Motor elèctric asíncron amb un rotor bobinat amb l'esquema de control més senzill: la inclusió de resistència al circuit del rotor té propietats de control extremadament baixes. Per tant, abans de la disponibilitat de convertidors de freqüència al mercat, es van desenvolupar diversos esquemes per obtenir una velocitat reduïda en mode de baixada.
De fet, no n'hi ha tants. A l'estranger, es va generalitzar l'ús d'una màquina elèctrica addicional, un fre de vòrtex muntat al mateix eix que el motor principal. L'esquema permet obtenir característiques mecàniques prou rígides en baixar la càrrega, però aquest accionament elèctric té característiques d'energia extremadament baixes (l'energia de frenada s'allibera al fre de vòrtex). A més, el fre de vortex té un cost força elevat i complica molt la disposició de la part mecànica.
Per això, per tal d'obtenir la velocitat d'aterratge en mecanismes d'elevació basats en un motor asíncron amb rotor de fase a la planta de Dynamo a finals dels anys setanta, un equip de disseny dirigit per E.M. Pevzner va introduir la frenada dinàmica autoexcitada.
Aquest accionament elèctric s'utilitza àmpliament en grues domèstiques (panells de tipus TSD, TSDI, KSDB per a grues pont, pòrtic i pòrtic, panells de control per a grues torre KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Així, estem parlant de desenes de milers de grues en funcionament.
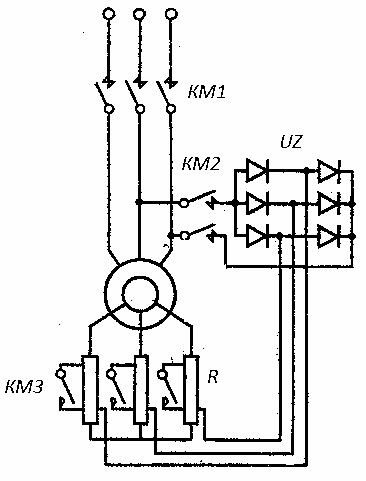
Arròs. 1. Esquema d'inclusió d'un motor asíncron en mode de frenada dinàmica per autoexcitació
El principi de frenada dinàmica amb autoexcitació és el següent:
El circuit del rotor inclou rectificador trifàsic UZ (Fig. 1). El motor elèctric es desconnecta de la xarxa mitjançant el contactor KM1. La tensió rectificada es connecta al bobinat de l'estator a través del contactor KM2. Els contactes del contactor KM3 estan tancats. Quan es deixa anar el fre (no es mostra al diagrama), l'eix del motor comença a girar sota l'acció del pes que cau.
S'indueix un EMF al bobinatge del rotor, sota la influència del qual comença a fluir un corrent al circuit rotor-estator. El motor desenvolupa el parell de frenada, la càrrega es redueix a una velocitat constant. El valor de la velocitat ve determinat pel valor de la resistència del circuit del rotor. Com més gran sigui la resistència, més ràpid serà el ritme de descens. Per augmentar la velocitat, el contactor KM3 està apagat.
En el mode de frenada dinàmica d'autoexcitació, l'accionament elèctric consumeix energia de la xarxa només per alimentar l'empenta hidràulica del fre i l'equip de relé-contactor. Com a exemple, la Fig. La figura 7 mostra les característiques mecàniques d'un accionament elèctric amb un panell TSD.
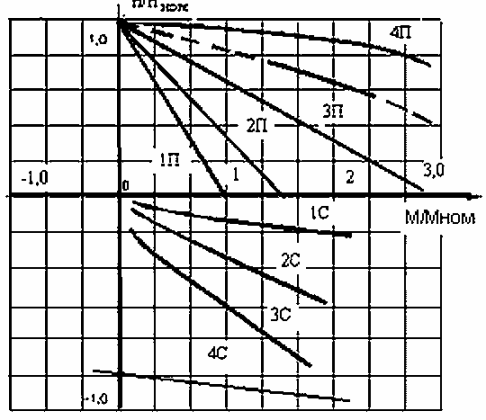
Arròs. 2. Característiques mecàniques de l'accionament elèctric del mecanisme d'elevació amb el panell TSD
Les característiques de frenada dinàmica es designen com a 1C, 2C, 3C. Es pot veure que les característiques tenen prou duresa. L'ajust de velocitat es realitza en el rang 1: 8, que en la majoria dels casos és suficient per a les aixetes massives.
La condició per a l'autoexcitació del motor elèctric és:
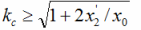
On x '2- resistència inductiva del bobinat del rotor, Ohm; хо- resistència inductiva del circuit magnetitzador. Om
On ks — coeficient de l'esquema
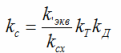
kd — coeficient de reducció del corrent del rotor al corrent de l'estator; kcx — coeficient del circuit de correcció, per a un circuit de pont trifàsic kx = 0,85; kt és el coeficient de transformació del motor d'estator a rotor
El coeficient kd depèn de l'esquema de connexió dels bobinats de l'estator, que estan connectats a una estrella en els motors d'aixetes domèstiques a una tensió de xarxa de 380 V.
El coeficient kt depèn del coeficient de transformació, és a dir. de la relació entre la tensió de l'estator i la tensió del rotor, que depèn del tipus de motor. Per exemple, per a diversos motors elèctrics de les sèries MT i 4MT, es tabula el valor i els paràmetres relacionats. 1.
Taula 1.
Potència del tipus de motor elèctric, kWt Tensió del rotor, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 290 1,31 0,1 293 6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0. 9 0,7 0,083 2,98 1,02
La condició кс ≥ √(1 + 2х '2/хо) es realitza per als motors del tipus MTN412-6, 4MTN225L6, que es poden anomenar "emocionats". Aquests motors elèctrics entren en el mode d'autoexcitació sense prendre decisions addicionals sobre el circuit. Tanmateix, en dispositius complets de baixa tensió (aparells de commutació de baixa tensió o panells de control) dissenyats per treballar conjuntament amb aquests motors, es proporciona una petita excitació inicial per a un funcionament fiable.
L'excitació inicial es realitza passant una constant, l'anomenada Un petit valor de "corrent de subministrament" (normalment no més del 10% del corrent nominal del motor) d'un rectificador de mitja ona. Per als motors excitats, en qualsevol cas, això és suficient per a una transició fiable al mode de frenada dinàmica autoexcitada.
Els motors elèctrics MTN512-6, 4MTN280M6, per als quals no es compleix la condició кс ≥ √(1 + 2х '2/хо), no estan "excitats". Això no vol dir que aquests motors no puguin funcionar en mode de frenada dinàmica amb autoexcitació, però el valor del corrent addicional requerit per a ells arriba al 50% del corrent nominal de l'estator.Això requereix l'ús de NKU (taulers de control) especials per a motors elèctrics no excitats. …
El motor elèctric tipus 4MTN280L10 amb кс = √(1 + 2х '2/хо) es troba al límit de l'autoexcitació i qualsevol canvi aleatori en els paràmetres pot violar la condició d'autoexcitació. Per tant, aquest motor també es pot classificar com a no excitable.
Els principals paràmetres que afecten la capacitat d'autoexcitació del motor elèctric és la tensió nominal del rotor E2nom. El valor crític d'E2nom, en què l'autoexcitació no es produeix sense un gran corrent d'alimentació, s'ha de prendre com a 300 V.
Aquesta característica del mode de frenada dinàmica d'autoexcitació la van tenir en compte la planta Dynamo i Sibelektromotor PO quan van desenvolupar una sèrie de motors elèctrics de grua de 4MT a principis dels anys vuitanta.
En particular, el valor E2nom d'alguns motors elèctrics s'ha reduït en comparació amb la sèrie MT anterior per fer que els motors siguin excitables.
Per exemple, per al motor elèctric 4MTN225L6, molt utilitzat en l'accionament elèctric de grues torre, E2nom es va reduir en comparació amb l'anterior motor de la sèrie MTN512-6 de 340 a 290 V, cosa que va fer que el motor s'autoexcitava. Més tard, OJSC "Sibelectromotor" va iniciar la producció del motor elèctric 4MTM225L6 amb els mateixos paràmetres.
Amb el temps, altres fabricants van començar a produir motors elèctrics amb una finalitat similar.
La planta de construcció de grues Rzhevsky produeix el motor elèctric MKAF225L6, la Siberian Electrotechnical Company produeix el motor elèctric 4MTM225L6 PND.Tot i l'aspecte diferent del prototip relacionat amb les capacitats tecnològiques de cadascun dels fabricants, tots aquests motors elèctrics tenen els mateixos paràmetres elèctrics i dimensions d'instal·lació i són completament intercanviables.
La diferència en els noms dels motors permet a l'usuari fer una elecció informada d'un o altre fabricant, guiat per les seves pròpies preferències, preu, termini de lliurament, etc. I al mateix temps, assegureu-vos que substituir un motor elèctric d'un fabricant d'aixetes per un motor elèctric d'un altre fabricant no comportarà un mal funcionament de l'aixeta o un accident.
Tanmateix, en l'última dècada, al mercat nacional han aparegut motors elèctrics de diversos fabricants, la marca dels quals reprodueix exactament la marca del motor elèctric "original" produït per JSC "Sibelectromotor". Es pot suposar que l'origen dels motors elèctrics està connectat amb el gran veí oriental del nostre país. El seu preu és lleugerament inferior al dels fabricants tradicionals, de manera que s'entén l'interès per ells dels subministraments de les empreses.
Així, demanant un motor elèctric per instal·lar-lo en una grua fabricada o substituint un motor elèctric danyat en una grua per un que funcioni, es pot aconseguir un motor elèctric d'un fabricant desconegut, amb un E2nom diferent del motor elèctric prototip.
La situació recorda una mica la de principis dels 90, quan diversos grups de pop homònims van girar pel país al mateix temps.
Recordem una vegada més que la relació E2nom / I2nom és el paràmetre més important d'un motor amb un rotor bobinat, que afecta l'elecció de resistències d'arrencada, equips de relé-contactor i, com s'ha esmentat anteriorment, a condició d'autoexcitació del motor elèctric.
Sovint, però, no hi ha dades del rotor a les plaques dels motors clonats. Aquí teniu un exemple:
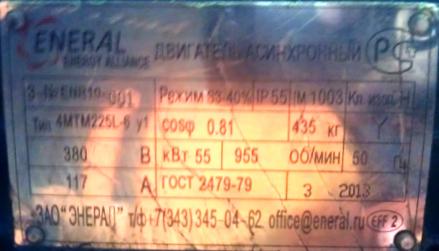
Arròs. 3. Placa d'identificació del motor asíncron de la grua rotor
Per cert, aquest motor elèctric tenia el valor "correcte" E2nom, només que ara s'havia de determinar empíricament.
Als catàlegs d'altres fabricants del motor elèctric 4MTM225L6 s'indica el valor E2nom = 340 V, és a dir. el motor excitat es va convertir en un no excitat. La conseqüència d'utilitzar aquest motor elèctric com a part d'un accionament elèctric amb frenada dinàmica amb autoexcitació és una caiguda de càrrega i separació del motor elèctric amb destrucció mecànica dels bobinatges del rotor i de l'estator.
És exactament aquesta imatge que l'autor va observar recentment en una de les empreses de construcció de màquines russes més antigues, on es va lliurar un nou pont grua amb un motor elèctric clonat del tipus 4MTM225L6 amb E2n = 340 V. Només per sort, la gent no ho va fer. patir. A més, el propietari de la grua restaura el motor tres (!) vegades després d'esquivar-lo.
Un altre fabricant de motors elèctrics clons, que aparentment ha patit accidents similars repetidament, ara produeix dos motors elèctrics amb la mateixa marca (!). Un amb E2nom = 340 V, l'altre amb E2nom = 264 V es dóna al catàleg amb una nota: "per a aixetes tipus KB", és a dir. grues torre.
De fet, aquest motor s'utilitza més a les grues torre, però també s'instal·la a les grues pont. Així es pot escoltar el diàleg entre el proveïdor i el client: “Per a quina grua necessites un motor? Per al paviment. A continuació, agafeu aquest (E2nom = 340 V). » I en l'accionament dels polipasts elèctrics hi ha un quadre de comandament amb frenada dinàmica autoexcitada. El resultat es descriu més amunt.
Al mateix temps, ningú diu que aquests motors elèctrics són defectuosos o poc fiables i que no es poden utilitzar a les grues. Com més opcions hi hagi al mercat, millor. Com diuen, hi ha motors més bons i diferents. És que la seva marca enganya el consumidor, que pot tenir conseqüències perilloses.
Per utilitzar un motor elèctric amb paràmetres de rotor diferents del prototip, heu de:
-
Mesureu E2nom quan el circuit del rotor estigui obert i el bobinatge de l'estator estigui connectat a la xarxa;
-
A partir de les mesures d'E2nom, calculeu, seleccioneu i ordeneu resistències de balast;
-
Trieu un quadre de comandament per a motors elèctrics sense excitació del catàleg i encarregueu-lo.
O simplement podeu preguntar sobre el valor d'E2nom abans de demanar un motor que atragui amb el seu preu i acordar-ho específicament al contracte. Tanmateix, això no impedeix la mesura d'E2nom durant el control d'entrada del motor ordenat.
Resumint l'anterior, podem extreure les següents conclusions:
-
En l'accionament elèctric de les aixetes domèstiques basades en motors elèctrics de rotor de fase, s'utilitza àmpliament la frenada dinàmica autoexcitada. Desenes de milers d'accionaments elèctrics d'aquest tipus estan en funcionament. Encara s'estan emetent.
-
Per funcionar en mode de frenada dinàmica autoexcitada, el motor elèctric ha de tenir una determinada relació E2nom / I2nom.
-
La condició principal per a l'autoexcitació d'un motor elèctric amb un rotor bobinat és el valor de E2nom ≤ 300 V.
-
L'ús de motors elèctrics amb E2nom> 300 V amb panells de control dissenyats per a motors elèctrics excitats pot provocar que la càrrega caigui i destrueixi el motor elèctric.