Convertidor de freqüència: tipus, principi de funcionament, esquemes de connexió
 El rotor de qualsevol motor elèctric és accionat per forces causades per un camp electromagnètic giratori dins del bobinatge de l'estator. La seva velocitat sol estar determinada per la freqüència industrial de la xarxa elèctrica.
El rotor de qualsevol motor elèctric és accionat per forces causades per un camp electromagnètic giratori dins del bobinatge de l'estator. La seva velocitat sol estar determinada per la freqüència industrial de la xarxa elèctrica.
El seu valor estàndard de 50 hertzs implica cinquanta períodes d'oscil·lació en un segon. En un minut, el seu nombre augmenta 60 vegades i és de 50×60 = 3000 revolucions. El rotor gira el mateix nombre de vegades sota la influència del camp electromagnètic aplicat.
Si canvieu el valor de la freqüència de la xarxa aplicada a l'estator, podeu ajustar la velocitat de gir del rotor i de l'accionament connectat a ell. Aquest principi és la base del control dels motors elèctrics.
Tipus de convertidors de freqüència
Per disseny, els convertidors de freqüència són:
1. tipus d'inducció;
2. electrònica.
Fabricat motors asíncrons segons l'esquema amb un rotor de fase i començat en mode generador, són representants del primer tipus. Durant el funcionament, tenen una eficiència baixa i es caracteritzen per una baixa eficiència.Per tant, no han trobat una àmplia aplicació en la producció i s'utilitzen molt rarament.
El mètode de conversió de freqüència electrònica permet una regulació suau de la velocitat tant de màquines asíncrones com de síncrones. En aquest cas, es pot aplicar un dels dos principis de control:
1. Segons una característica predeterminada de la dependència de la velocitat de rotació de la freqüència (V / f);
2. mètode de control vectorial.
El primer mètode és el més senzill i menys perfecte, i el segon s'utilitza per controlar amb precisió les velocitats de rotació dels equips industrials crítics.
Característiques del control vectorial de conversió de freqüència
La diferència entre aquest mètode és la interacció, la influència del dispositiu de control del convertidor sobre el «vector espacial» del flux magnètic que gira amb la freqüència del camp del rotor.
Els algorismes perquè els convertidors funcionin amb aquest principi es creen de dues maneres:
1. control sense sensors;
2. regulació del cabal.
El primer mètode es basa en determinar una certa dependència de l'alternança de seqüències modulació d'amplada de pols (PWM) inversor per a algorismes preestablerts. En aquest cas, l'amplitud i la freqüència de la tensió de sortida del convertidor es controlen pel corrent de lliscament i la càrrega, però sense utilitzar la retroalimentació de la velocitat del rotor.
Aquest mètode s'utilitza quan es controlen diversos motors elèctrics connectats en paral·lel amb el convertidor de freqüència.El control de flux consisteix a controlar els corrents de funcionament dins del motor amb la seva descomposició en components actius i reactius i fer ajustos al funcionament del convertidor per establir l'amplitud, la freqüència i l'angle dels vectors de voltatge de sortida.
Això millora la precisió del motor i augmenta els límits del seu ajust. L'ús del control de flux amplia les capacitats dels accionaments que operen a baixes velocitats amb càrregues dinàmiques elevades, com ara polipasts de grua o màquines de bobinat industrials.
L'ús de la tecnologia vectorial permet implementar un control dinàmic del parell motors asíncrons trifàsics.
Circuit equivalent
Un circuit elèctric simplificat bàsic d'un motor d'inducció es pot representar de la següent manera.
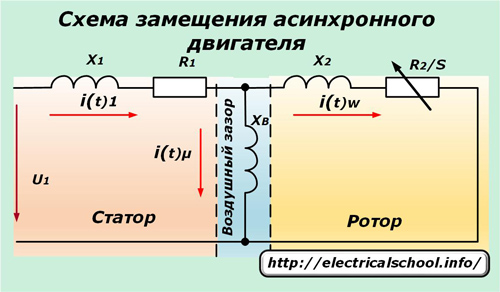
S'aplica una tensió u1 als bobinats de l'estator, que tenen una resistència activa R1 i una resistència inductiva X1. Aquest, superant la resistència de l'entrefer Xv, es transforma en el bobinat del rotor, provocant-hi un corrent que supera la seva resistència.
Circuit equivalent d'un circuit vectorial
La seva construcció ajuda a entendre els processos que tenen lloc en el motor d'inducció.

L'energia del corrent de l'estator es divideix en dues parts:
-
iµ — partició formadora de flux;
-
iw — component generador de moment.
En aquest cas, el rotor té una resistència activa depenent del lliscament R2 / s.
Per al control sense sensor, es mesura el següent:
-
tensió u1;
-
corrent i1.
Segons els seus valors, calculen:
-
iµ — component de flux que forma el flux;
-
iw — parell generador de valor.
L'algoritme de càlcul inclou ara un circuit electrònic equivalent d'un motor d'inducció amb reguladors de corrent, que té en compte les condicions de saturació del camp electromagnètic i les pèrdues d'energia magnètica en l'acer.
Els dos components dels vectors actuals, diferents en angle i amplitud, giren juntament amb el sistema de coordenades del rotor i es converteixen en un sistema d'orientació de l'estator estacionari.
Segons aquest principi, els paràmetres del convertidor de freqüència s'ajusten segons la càrrega del motor d'inducció.
Principi de funcionament del convertidor de freqüència
Aquest dispositiu, que també s'anomena inversor, es basa en un doble canvi en la forma d'ona de la xarxa elèctrica.
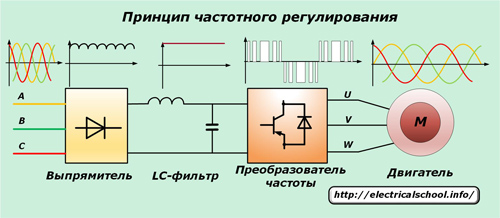
Inicialment, la tensió industrial s'alimenta a un rectificador amb potents díodes que eliminen els harmònics sinusoïdals però deixen ondulacions del senyal. Per a la seva eliminació, es proporciona un banc de condensadors amb una inductància (filtre LC), que proporciona una forma estable i suavitzada a la tensió rectificada.
Aleshores, el senyal va a l'entrada del convertidor de freqüència, que és un circuit de pont trifàsic de sis transistors de potència Sèrie IGBT o MOSFET amb díodes de protecció de voltatge de polaritat inversa. Els tiristors utilitzats anteriorment per a aquests propòsits no tenen prou velocitat i funcionen amb grans pertorbacions.
Per activar el mode "fre" del motor, es pot instal·lar al circuit un transistor controlat amb una potent resistència que dissipa energia. Aquesta tècnica permet eliminar la tensió generada pel motor per protegir els condensadors del filtre de sobrecàrregues i danys.
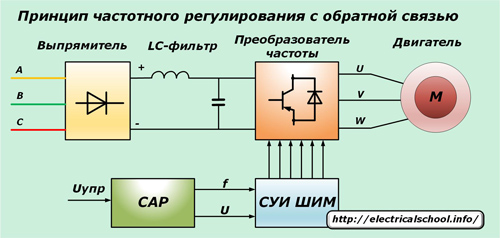
El mètode de control de freqüència vectorial del convertidor permet crear circuits que realitzen un control automàtic del senyal dels sistemes ACS. Per a això s'utilitza un sistema de gestió:
1. amplitud;
2. PWM (simulació d'amplada de pols).
El mètode de control d'amplitud es basa en canviar la tensió d'entrada i PWM es basa en l'algorisme per canviar els transistors de potència a una tensió d'entrada constant.
Amb la regulació PWM, es crea un període de modulació del senyal quan el bobinatge de l'estator es connecta en ordre estricte als terminals positius i negatius del rectificador.
Atès que la freqüència de rellotge del generador és bastant alta, a l'enrotllament del motor elèctric, que té una resistència inductiva, es suavitzen a una ona sinusoïdal normal.
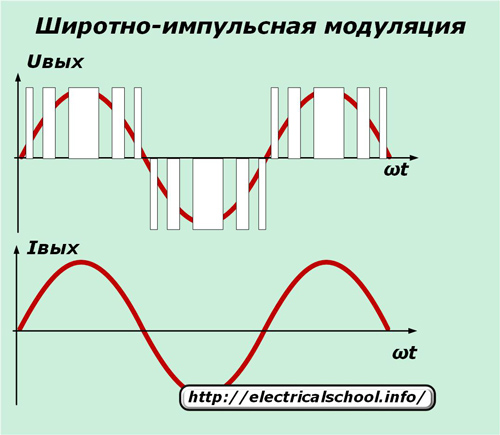
Els mètodes de control PWM maximitzen l'eliminació de les pèrdues d'energia i proporcionen una alta eficiència de conversió gràcies al control simultani de freqüència i amplitud. Estan disponibles a causa del desenvolupament de tecnologies de control de tiristors bloquejats amb potència de la sèrie GTO o de marques bipolars de transistors IGBT de porta aïllada.
Els principis de la seva inclusió per controlar un motor trifàsic es mostren a la foto.
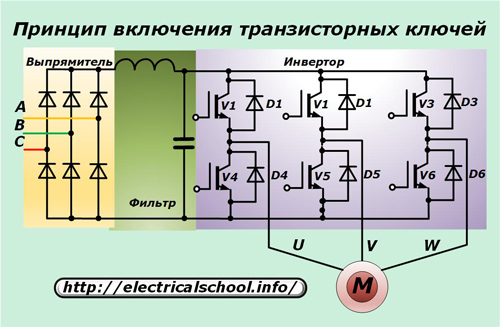
Cadascun dels sis IGBT està connectat en circuit antiparal·lel al seu propi díode de corrent inversa. En aquest cas, el corrent actiu del motor d'inducció passa pel circuit de potència de cada transistor i el seu component reactiu es dirigeix a través dels díodes.
Per eliminar la influència del soroll elèctric extern en el funcionament de l'inversor i el motor, el circuit del convertidor de freqüència pot incloure filtre de reducció de sorollliquidació:
-
interferències de ràdio;
-
descàrregues elèctriques provocades per l'equip en funcionament.
Aquests són senyalitzats pel controlador i s'utilitza cablejat blindat entre el motor i els terminals de sortida de l'inversor per reduir el xoc.
Per millorar la precisió de funcionament dels motors asíncrons, el circuit de control dels convertidors de freqüència inclou:
-
entrada de comunicació amb capacitats d'interfície avançades;
-
controlador integrat;
-
targeta de memòria;
-
programari;
-
pantalla LED informativa que mostra els principals paràmetres de sortida;
-
picador de fre i filtre EMC integrat;
-
sistema de refrigeració del circuit basat en el bufat amb ventiladors de major recurs;
-
la funció d'escalfar el motor amb corrent continu i algunes altres possibilitats.
Esquemes de cablejat operacional
Els convertidors de freqüència estan dissenyats per funcionar amb xarxes monofàsiques o trifàsiques. Tanmateix, si hi ha fonts industrials de corrent continu amb una tensió de 220 volts, es poden alimentar els inversors.

Els models trifàsics estan dissenyats per a una tensió de xarxa de 380 volts i l'alimenten al motor elèctric. Els inversors monofàsics funcionen amb 220 volts i produeixen tres fases distribuïdes en el temps.
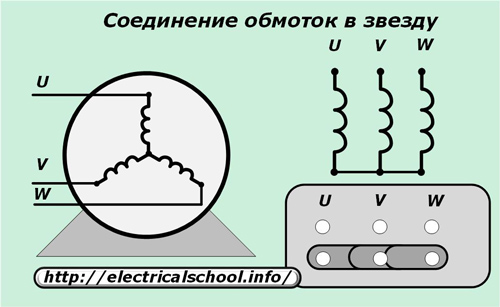
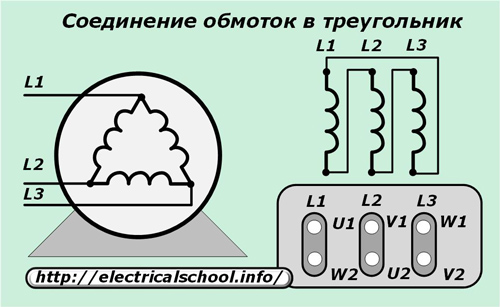
L'esquema de connexió del convertidor de freqüència al motor es pot dur a terme segons els esquemes:
-
estrelles;
-
triangle.
Els bobinatges del motor estan muntats en una «estrella» per al convertidor, alimentada per una xarxa trifàsica de 380 volts.
Segons l'esquema "delta", els bobinatges del motor es munten quan el convertidor de potència està connectat a una xarxa monofàsica de 220 volts.
Quan escolliu un mètode per connectar un motor elèctric a un convertidor de freqüència, heu de parar atenció a la relació de potència que pot crear un motor en marxa en tots els modes, inclòs un arrencada lent i carregat, amb les capacitats de l'inversor.
És impossible sobrecarregar constantment el convertidor de freqüència i una petita reserva de la seva potència de sortida garantirà el seu funcionament a llarg termini i sense problemes.