Característiques mecàniques d'un motor d'inducció en diferents modes, voltatges i freqüències
 Les característiques mecàniques dels motors d'inducció es poden expressar com n = f (M) o n=e (I). Tanmateix, les característiques mecàniques dels motors asíncrons s'expressen sovint en forma de dependència M = f(S), on C - lliscament, S = (nc-n) / nc, on ns - velocitat síncrona.
Les característiques mecàniques dels motors d'inducció es poden expressar com n = f (M) o n=e (I). Tanmateix, les característiques mecàniques dels motors asíncrons s'expressen sovint en forma de dependència M = f(S), on C - lliscament, S = (nc-n) / nc, on ns - velocitat síncrona.
A la pràctica, s'utilitza una fórmula simplificada anomenada fórmula de Kloss per a la construcció gràfica de les característiques mecàniques:

aquí: Mk — valor de parell crític (màxim). Aquest valor de moment correspon al lliscament crític

on λm = Mk / Mn
La fórmula de Kloss s'utilitza per resoldre problemes relacionats amb l'accionament elèctric realitzat mitjançant un motor d'inducció. Mitjançant la fórmula de Kloss, podeu construir un gràfic de característiques mecàniques segons les dades del passaport del motor d'inducció. Per als càlculs pràctics, només s'ha de tenir en compte el signe més a la fórmula per determinar el moment crític abans de l'arrel.
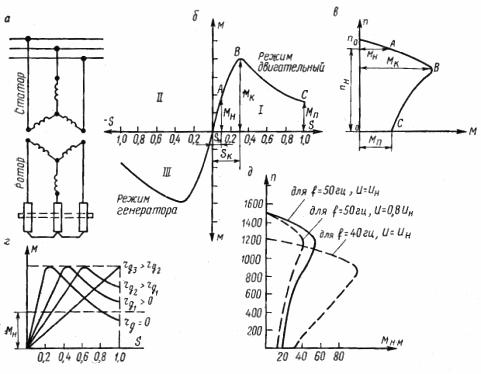
Arròs. 1.Motor asíncron: a — diagrama esquemàtic, b — característica mecànica M = f (S) — natural en els modes de motor i generador, c — característica mecànica natural n = f (M) en mode de motor, d — característiques mecàniques d'un reòstat artificial, e — característiques mecàniques per a diferents tensions i freqüències.

Motor d'inducció de gàbia d'esquirol
Com es pot veure a la fig. 1, característiques mecàniques d'un motor d'inducció situat als quadrants I i III. La part de la corba al quadrant I correspon a un valor de lliscament positiu i caracteritza el mode de funcionament del motor asíncron, i al quadrant III, el mode generador. El mode de motor és de major interès pràctic.
El gràfic de les característiques mecàniques del mode motor conté tres punts característics: A, B, C i es pot dividir condicionalment en dues seccions: OB i BC (Fig. 1, c).
El punt A correspon al parell nominal del motor i està determinat per la fórmula Mn = 9,55•103•(Strn /nn)
Aquest moment correspon lliscament nominal, que per a motors amb aplicació industrial general té un valor en el rang de l'1 al 7%, és a dir, Sn = 1 - 7%. Al mateix temps, els motors petits tenen més lliscament i els grans menys.
Els motors d'alt lliscament destinats a la càrrega de xoc tenen un Сn~15%. Aquests inclouen, per exemple, els motors de corrent altern d'una sèrie.
El punt C de la característica correspon al valor del parell inicial que es produeix a l'eix del motor a l'arrencada. Aquest moment Mp s'anomena inicial o inicial. En aquest cas, el lliscament és igual a la unitat i la velocitat és zero. Parell d'arrencada és fàcil de determinar a partir de les dades de la taula de referència, que mostra la relació entre el parell inicial i el Mp / Mn nominal.
La magnitud del parell d'arrencada a valors constants de tensió i freqüència de corrent depèn de la resistència activa del circuit del rotor. En aquest cas, inicialment a mesura que augmenta la resistència activa, el valor del parell d'arrencada augmenta, arribant al seu màxim quan la resistència activa del circuit del rotor és igual a la resistència inductiva total del motor. Posteriorment, a mesura que augmenta la resistència activa del rotor, el valor del parell inicial disminueix, tendint a zero en el límit.
El punt C (Fig. 1, b i c) correspon a un moment màxim que pot desenvolupar el motor en tot el rang de revolucions des de n = 0 fins a n = ns... Aquest moment s'anomena moment crític (o de bolcada) Mk . El moment crític també correspon al lliscament crític Sk. Com més petit sigui el valor del lliscament crític Sk, així com el valor del lliscament nominal Сn, major serà la rigidesa de les característiques mecàniques.
Els moments inicials i crítics els determinen els nominals. Segons GOST per a màquines elèctriques amb motor de gàbia d'esquirol, s'ha de complir la condició Mn / Mn = 0,9 - 1,2, Mk / Mn = 1,65 - 2,5.
Cal tenir en compte que el valor del moment crític no depèn de la resistència activa del circuit del rotor, mentre que el lliscament crític Сk és directament proporcional a aquesta resistència.Això significa que amb un augment de la resistència activa del circuit del rotor, el valor del moment crític es manté sense canvis, però el màxim de la corba de parell es desplaça a valors de lliscament creixents (Fig. 1, d).
La magnitud del parell crític és directament proporcional al quadrat de la tensió aplicada a l'estator i inversament proporcional al quadrat de la freqüència de les tensions i la freqüència del corrent a l'estator.
Si, per exemple, la tensió subministrada al motor és igual al 85% del valor nominal, la magnitud del parell crític serà de 0,852 = 0,7225 = 72,25% de parell crític a la tensió nominal.
S'observa el contrari quan es canvia la freqüència. Si, per exemple, a un motor dissenyat per funcionar amb una freqüència de corrent de = 60 Hz, un corrent d'alimentació amb una freqüència de = 50 Hz, llavors el moment crític arribarà a (60/50)2 = 1,44 vegades més gran que l'oficial valora la seva freqüència (Fig. 1, e).
El moment crític caracteritza la capacitat de sobrecàrrega instantània del motor, és a dir, mostra quin moment (en pocs segons) de sobrecàrrega és capaç de suportar el motor sense cap conseqüència perjudicial.

La secció de la característica mecànica des de zero fins al valor màxim (crític) (vegeu la figura 1, biv) s'anomena part estable de la característica, i la secció BC (Fig. 1, c) - la part inestable.
Aquesta divisió s'explica pel fet que en la part creixent de les característiques OF amb l'augment de lliscament, és a dir. a mesura que disminueix la velocitat, augmenta el parell desenvolupat pel motor.Això vol dir que a mesura que augmenta la càrrega, és a dir, a mesura que augmenta el parell de frenada, la velocitat de rotació del motor disminueix i augmenta el parell augmentat. Quan la càrrega disminueix, per contra, augmenta la velocitat i disminueix el parell. A mesura que la càrrega canvia en tot el rang de la part estable de la característica, la velocitat de rotació i el parell del motor canvien.
El motor no pot desenvolupar més que el parell crític, i si el parell de frenada és més gran, el motor s'ha d'aturar inevitablement. Es produeix un bolcament del motor, com diuen.
Una característica mecànica a U i I constants i l'absència de resistència addicional al circuit del rotor s'anomena característica natural (característica d'un motor d'inducció de gàbia d'esquirol amb un rotor bobinat sense resistència addicional al circuit del rotor). Les característiques artificials o reostàtiques s'anomenen les que corresponen a la resistència addicional en el circuit del rotor.
Tots els valors de parell d'arrencada són diferents i depenen de la resistència activa del circuit del rotor. Lliscants de diferents magnituds corresponen al mateix parell nominal Mn. A mesura que augmenta la resistència del circuit del rotor, augmenta el lliscament i, per tant, disminueix la velocitat del motor.
A causa de la inclusió de la resistència activa al circuit del rotor, la característica mecànica de la part estable s'estira en la direcció del lliscament creixent, proporcional a la resistència.Això significa que la velocitat del motor comença a variar significativament en funció de la càrrega de l'eix i la característica dura es torna suau.